Geometric transform¶
约 2835 个字 13 张图片 预计阅读时间 9 分钟
Abstract
- Simple geometric transform
- Interpolation
- Warp and morph
- Application
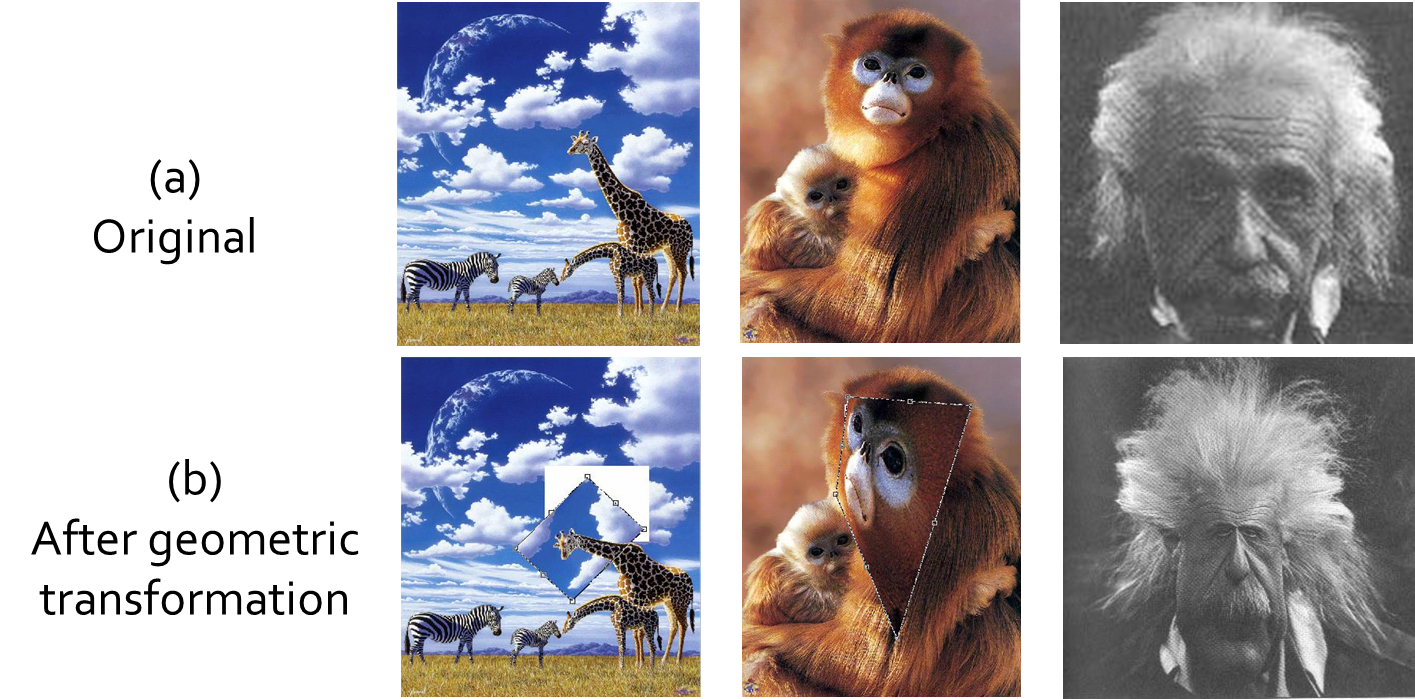
利用变换函数改变图像中像素的位置,从而产生新图像的过程。
几何变换不改变像素值,而是改变像素所在的位置。
Example
\(g(x,y)=f(x^{'},y^{'})=f[a(x,y),b(x,y)]\)
\(f(x,y)\) 表示输入图像, \(g(x,y)\) 表示输出图像。函数 \(a(x,y)\) 和 \(b(x,y)\) 唯一地描述了空间变换。
几何变换根据难易程度通常可以归结为两类:
- 简单变换——变换过程(各个像素变换前后的位置)以及变换参数可知时的变换,如图像的平移、镜像、转置、旋转、缩放、错切变换等。
- 一般变换——变换过程不是一目了然,变换参数难以测量时的变换。通常情况下,对图像畸变进行校正时,需要用到较为复杂的变换公式。
Simple geometric transform¶
Translation¶
将图像沿水平和竖直方向移动,从而产生新图像的过程。
平移后的景物与原图像相同,但“画布”一定是扩大了,否则就会丢失信息。
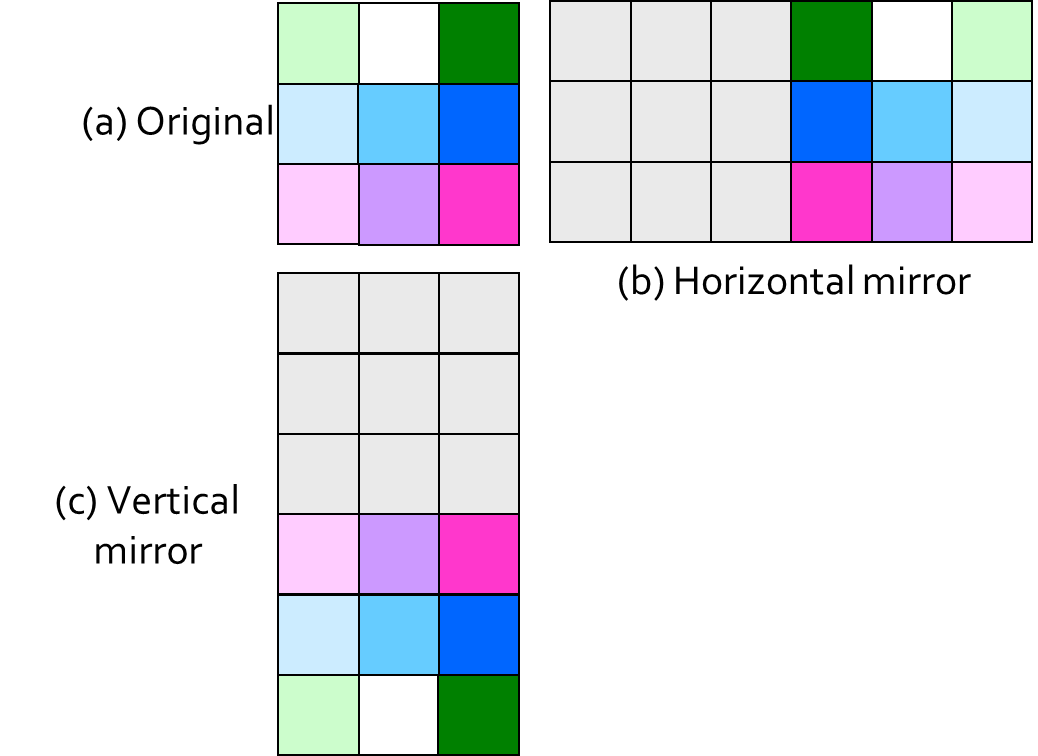
Mirror¶
绕 x 轴或 y 轴翻转,从而产生与原图像对称的新图像的过程 : \(\left\{ \begin{matrix} x^{'}=x \\ y^{'}=-y \end{matrix} \right.\) 绕x轴或y轴翻转,从而产生与原图像对称的新图像的过程: \(\left\{ \begin{matrix} x^{'}=-x \\ y^{'}=y \end{matrix} \right.\)
当 \(S_x = 1\),且 \(S_y = -1\) 时实现绕 x 轴的镜像变换 当 \(S_x = -1\),且 \(S_y = 1\) 时实现绕y轴的镜像变换
Rotation¶
绕原点旋转 \(\theta\) 角,得到新图像的过程
Example
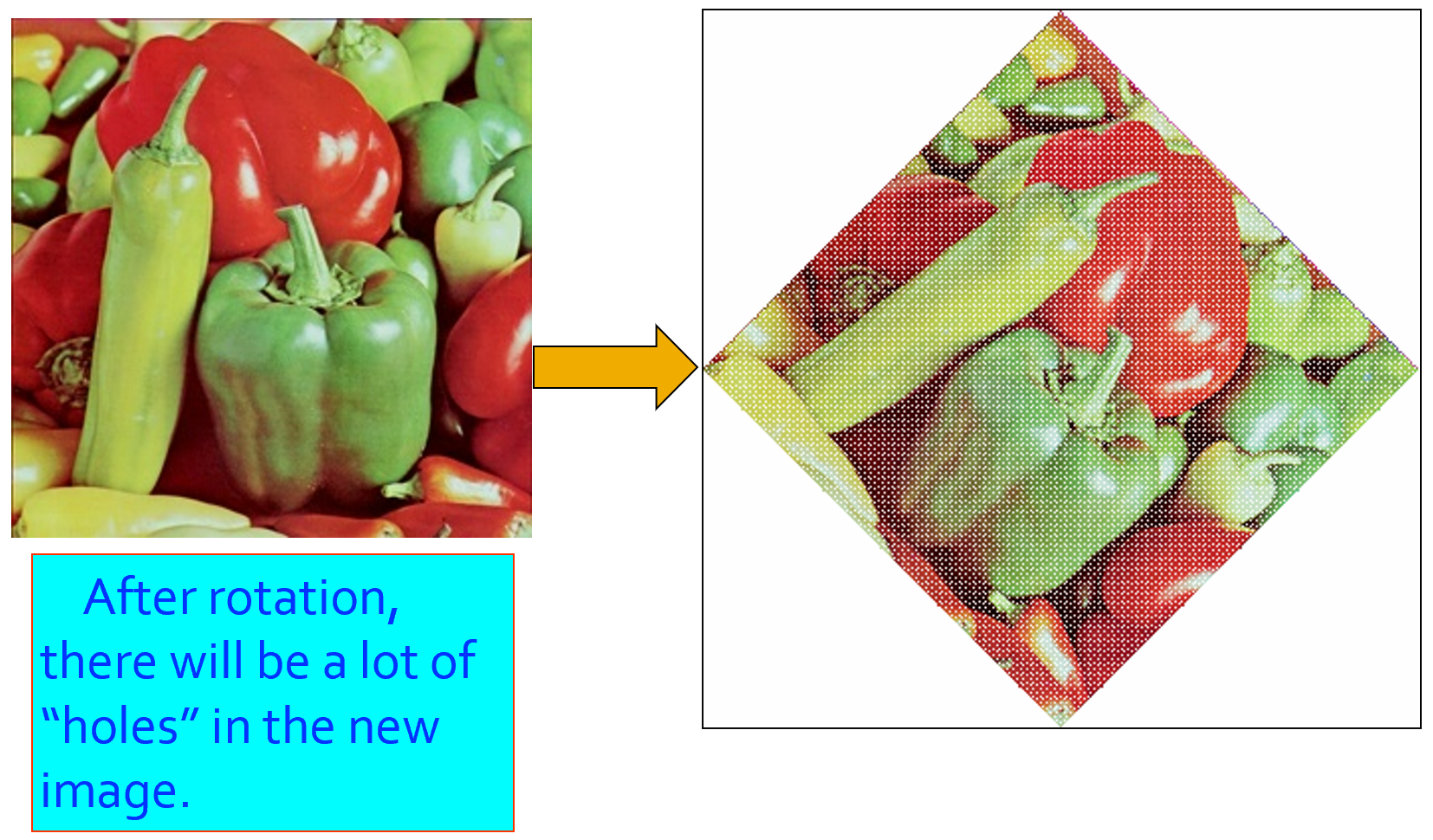
四舍五入 / 保留原来背景颜色(空白)
空洞问题,图像经过旋转变换以后,新图像中会出现许多空洞,需要插入
解决:
用插值方法填补。
行插值——按顺序寻找每一行中的空洞像素,设置其像素值与同一行中前一个像素的像素值相同。
还可以缩放。
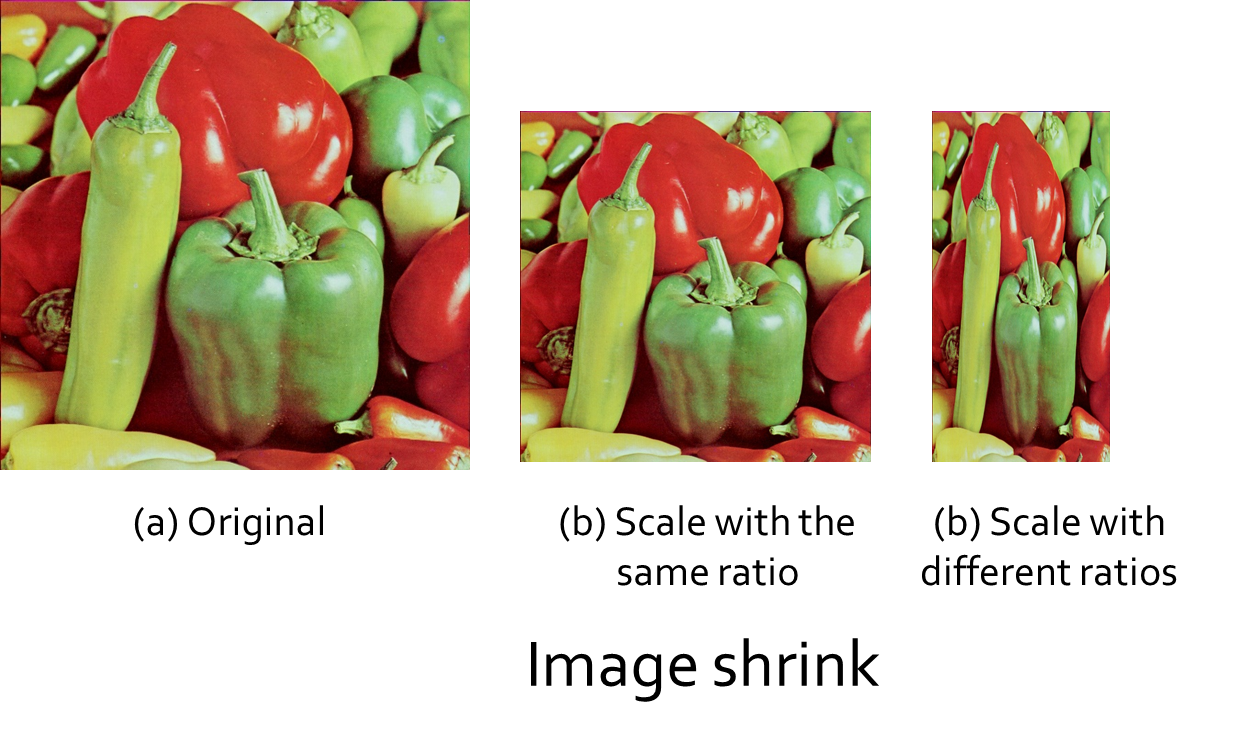
Scale¶
将图像乘以一定系数,从而产生新图像的过程。
或者用矩阵表示为
- 沿 x 轴方向缩放 c 倍(c>1 时为放大,0<c<1 时为缩小
) ;沿 y 轴方向缩放 d 倍(d>1 时为放大,0<d<1 时为缩小) 。 - 当 \(c=d\) 时,图像等比缩放;否则为非等比缩放,导致图像变形。
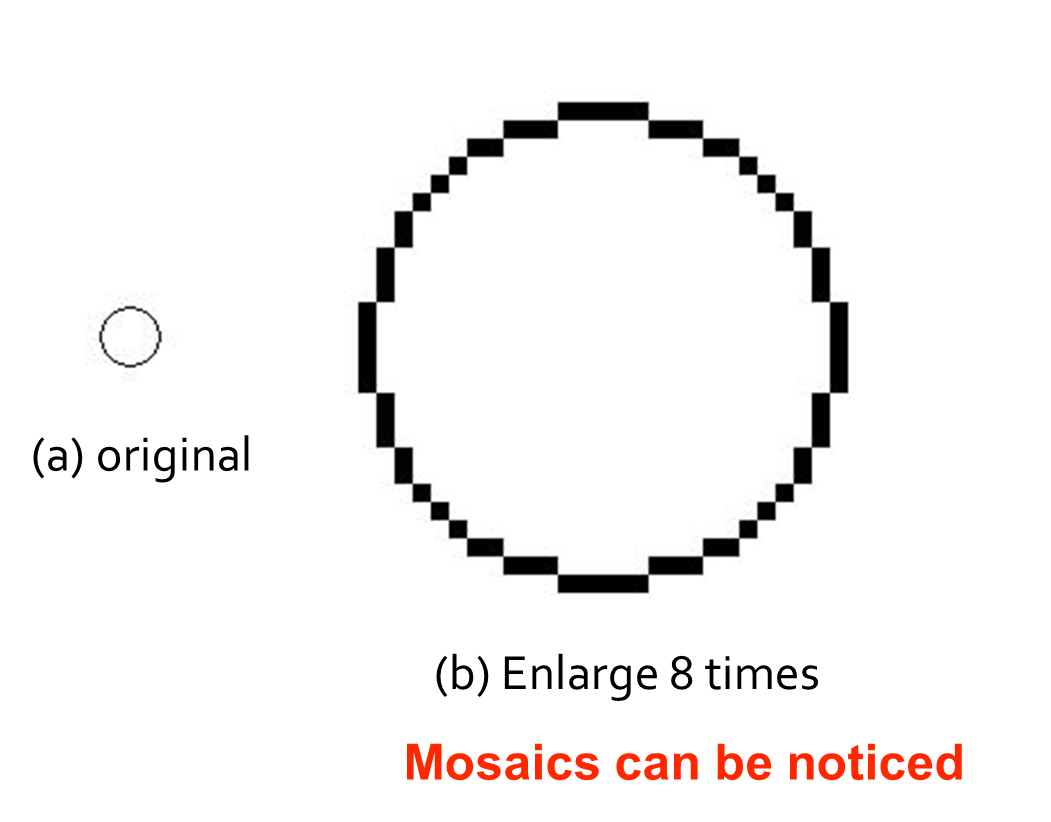
- 缩小——按一定间隔选取某些行和列的像素构成缩小后的新图像;
- 放大——新图像出现空行和空列,可采用插值的方法加以填补,但存在“马赛克”现象。
e.g.
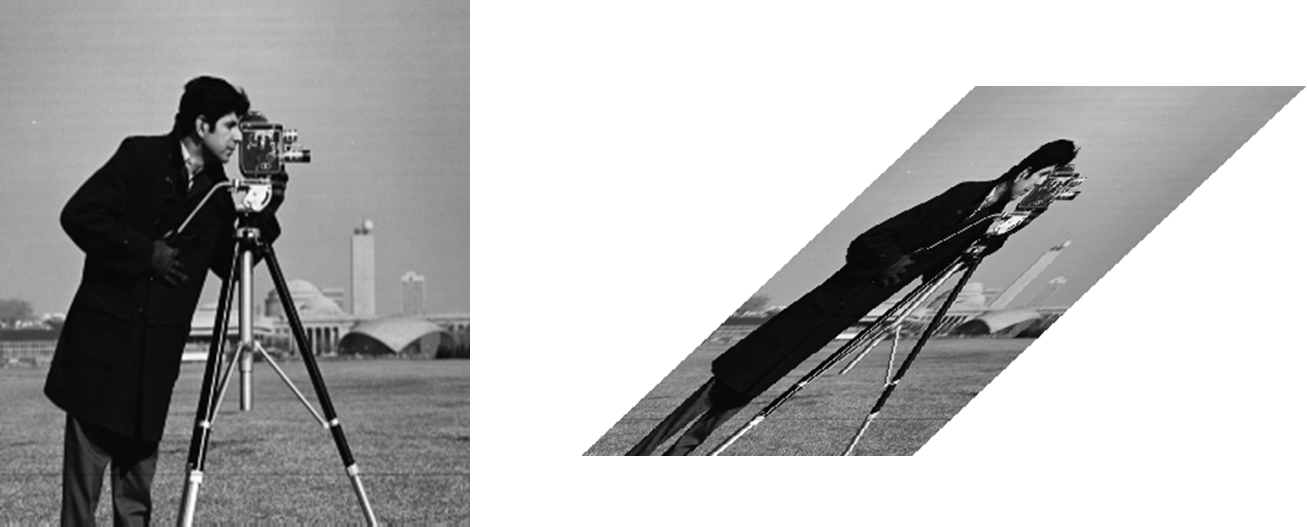
Shear¶
图像的错切变换实际上是景物在平面上的非垂直投影效果。
假设剪切变换的参数为 \(d_x\) 或者 \(d_y\),那么可以用数学公式表现为
- Shear on x-axis: \(\left\{ \begin{matrix} a(x,y)=x+d_xy\\ b(x,y)=y \end{matrix} \right.\)
- Shear on y-axis: \(\left\{ \begin{matrix} a(x,y)=x\\ b(x,y)=y+d_yx \end{matrix} \right.\) 仅 x 坐标或 y 坐标受到剪切或者 x、y 同时受到剪切的变换矩阵分别为:
e.g.
Combination¶
图像的组合变换是各项简单几何变换的混合操作。
变换矩阵是由构成组合变换的各种简单变换的变换矩阵按从左至右的顺序逐次相乘以后得到的结果。
变换矩阵相乘时的顺序是不可以任意改变的
Interpolation¶
插值是几何变换最常用的工具,利用已知像素值,采用不同的插值方法,可以模拟出未知像素的像素值。
Nearest neighbor¶
最近邻插值:输出像素的灰度值等于离它所映射到的位置最近的输入像素的灰度值。
计算过程:
为了计算几何变换后新图像中某一点P’处的像素值,可以首先计算该几何变换的逆变换,计算出P’所对应的原图像中的位置P。通常情况下,P的位置不可能正好处在原图像的某一个像素位置上(即P点的坐标通常都不会正好是整数)。寻找与P点最接近的像素Q,把Q点的像素值作为新图像中P’点的像素值。
 当图像中包含明显的几何结构时,结果将不太光滑连续,从而在图像中产生人为的痕迹。
当图像中包含明显的几何结构时,结果将不太光滑连续,从而在图像中产生人为的痕迹。
Linear interpolation¶
在一维情况下,已知 x1 和 x2 处的灰度值分别为 g1 和 g2,则 x3 处的灰度值 g3 为:
\(g_3=\dfrac{g_2-g_1}{x_2-x_1}(x_3-x_1)+g_1\)
但我们图像是二维的(行列
在二维情况下,称为双线性插值。 已知图像的正方形网格上四个点A、B、C、D的灰度,求P点的灰度。
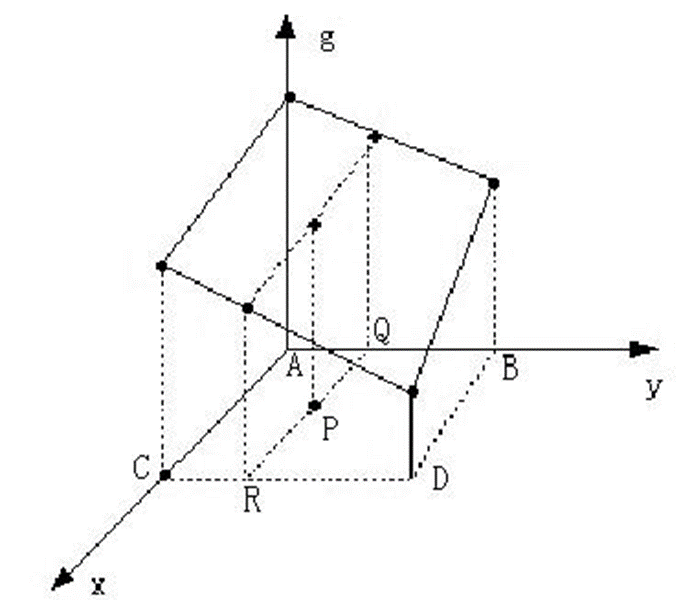
- 定义双线性方程 \(g(x,y)=ax+by+cxy+d\)
- 分别将 A、B、C、D 四点的位置和灰度代入方程,得到方程组。
- 解方程组,解出 a、b、c、d 四个系数。
- 将 P 点的位置代入方程,得到 P 点的灰度。
可以并行计算 . 实际中可以分别在行列做两次线性插值,随后再在前两次基础上进行一次线性插值。
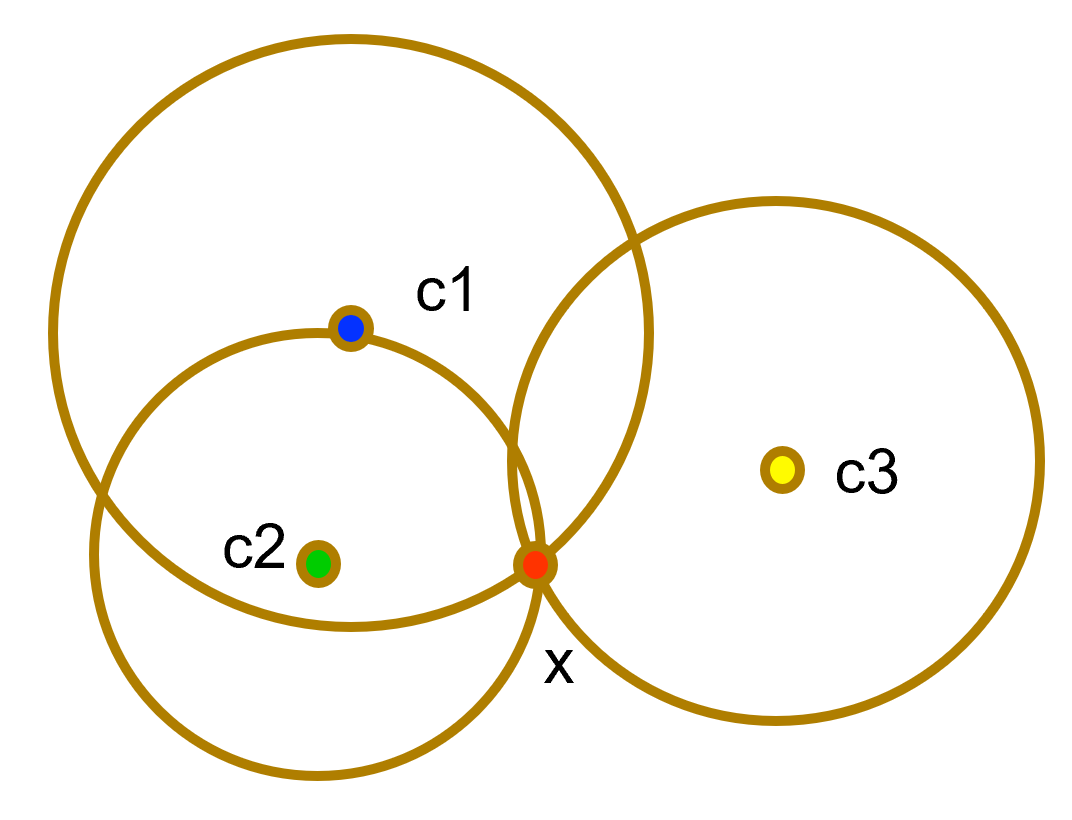
RBF interpolation¶
\(G(x)=\sum_{i=1}^n w_iG(c_i)\) where \(w_i=\dfrac{\phi(|x-c_i|)}{\sum_{i=1}^n\phi(|x-c_i|}\)
其中 \(x\) 可以是一个标量,也可以是一个向量,也就是说既可以是一维插值,也可以是二维、多维插值,取决于 \(x\) 的维度。
用鼠标拖,离鼠标越近,受影响越小
常用的核函数:
- Gaussian: \(\phi(r)=exp\{-\dfrac{e^2}{2\sigma^2}\}\)
- Multiquadrics: \(\phi(r)=\sqrt{1+\dfrac{r^2}{\sigma^2}}\)
- Linear: \(\phi(r)=r\)
- Cubic: \(\phi(r)=r^3\)
- Thinplate: \(\phi(r)=r^2\ln(r+1)\)
Warp and Morph¶
Warp: 只改变像素的位置
Morph 不仅改变位置,还要改变颜色
Image Morph¶
这里讨论的 Morph 变形不同于一般的几何变换 (Warp)
Morph 变形指景物的形体变化,它是使一幅图像逐步变化到另一幅图像的处理方法。
这是一种较复杂的二维图像处理,需要对各像素点的颜色、位置作变换。
变形的起始图像和结束图像分别为两幅关键帧(起始帧和结束帧
大小相同的两幅图的转换作静态变换。从一幅图 a 逐渐变化成第二幅图 b
- 原理:让图 a 中每个像素的颜色,逐渐变成图 b 相同位置像素的颜色。
- 方法:根据变换的快慢,设置相应的步长,将图 a 每一点的 RGB 逐渐变成图 b 相同位置象素的 RGB。可以选择等比或等差的方式,或其它方式让:\(r^a\rightarrow r^b\)
如:\(I_i=I_{begin}+i*\dfrac{I_{end}-I_{begin}}{n}\) - 对于彩色图像,RGB 三色同时从原图变到目标图像。可以分别变化,也可考虑 RGB 的相对比例关系同时变化。
对于灰度图像,可以直接用等比或等差级数定义步长,使颜色从原图变到目标图。
如何选择关键帧:
选择两幅结构相似、大小相同的画面作为起始和结束关键帧,这样才能比较容易地实现自然、连续的中间变形过程。(否则效果很差)
Morph based on segment¶
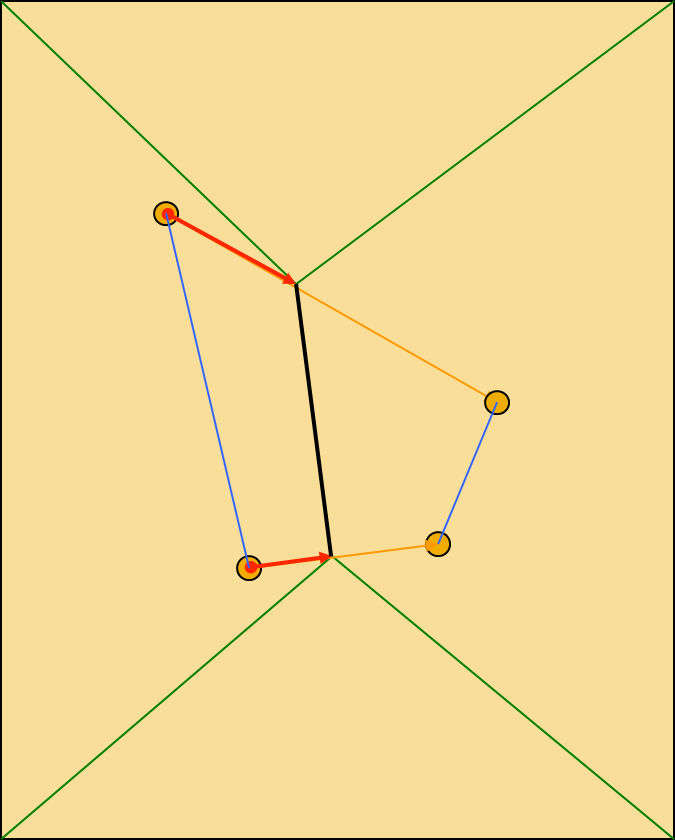
以点为中心控制像素的移动。利用 RBF 的思路,移动线段。距离控制点越近,移动幅度越相似。
在起始和结束画面上确定和勾画出各部分(主要轮廓)的结构对应关系,也即从起始画面上的一个点变到结束画面上的另一个对应点的位置,这是变形运算所需要的参数。根据需要,对应点的位置可以任意移动。调整起始帧的对应点位置,可以模拟摄像中的镜头渐变效果。
在各点像素坐标变化的同时,每个像素的颜色 RGB 也一起从原图像改变为目标图像。
这时可以采用不同的插值策略计算像素中间值(空间,颜色)
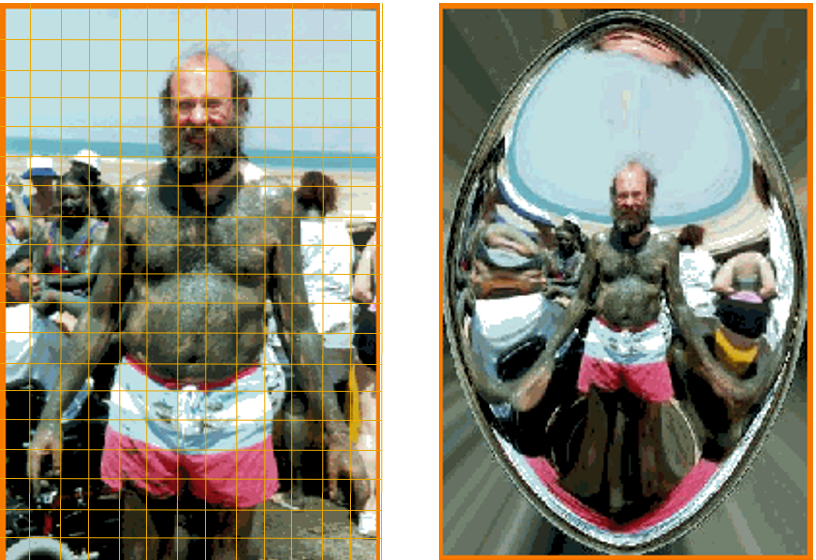
Morph based on grid¶
视点变换就是求在视点移动后原始图像变换生成的新视图。
- 在用相机拍摄物体时,保持物体的位置不动,而将相机移离物体,这就相当于视点变换;
- 如果我们保持相机固定位置,将物体移离相机,这就相当于模型转换。
视点变形要求对物体有三维坐标知识。
Application¶
Question
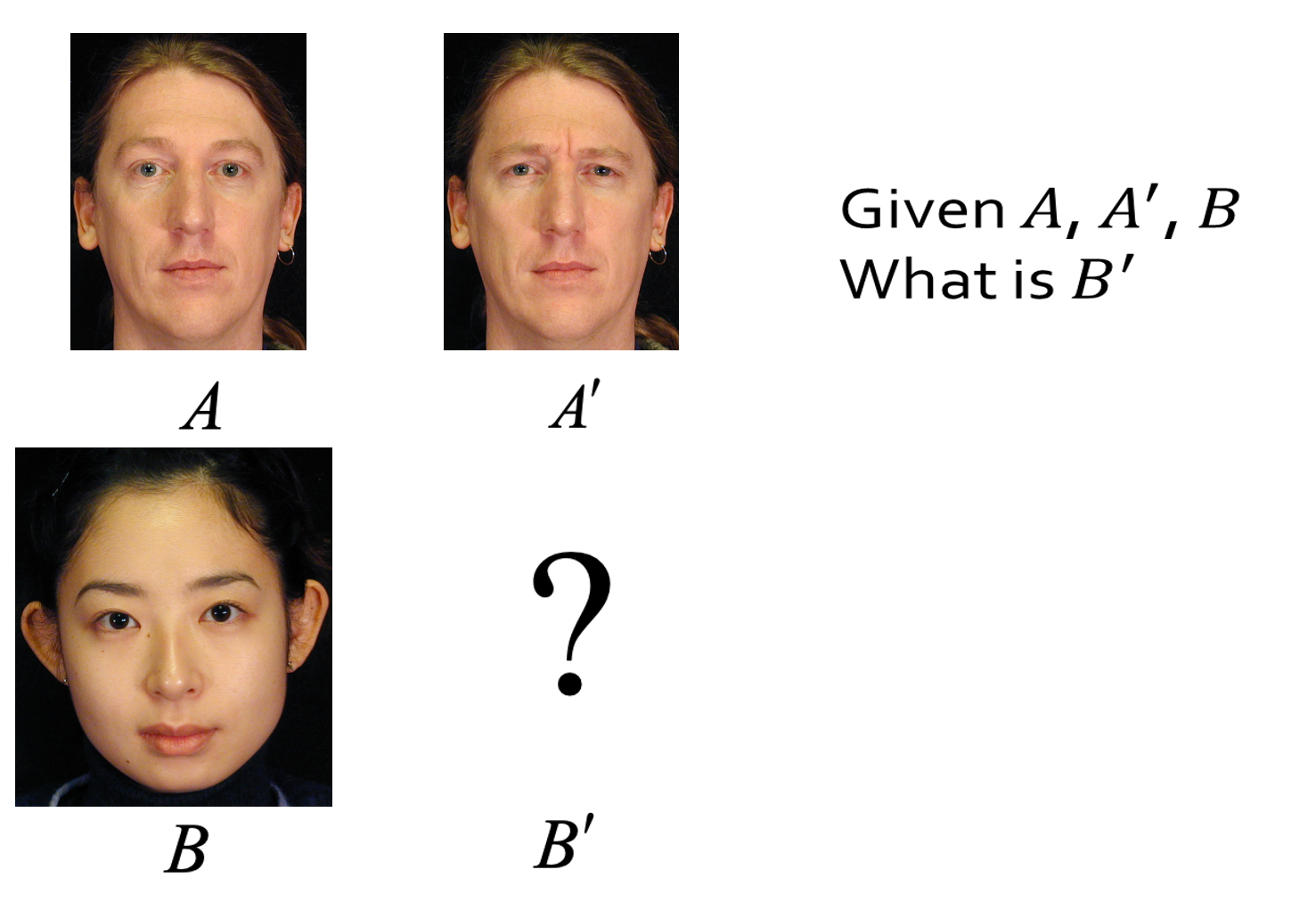
我们可以 \(v_{B'}=v_{B}+v_{A'}-v_A\), 但这样得到的表情细节丢失了。
为此,我们需要先介绍一个光照模型 Lambertian model.
Lambertian model¶
假设空间中 m 点光源,曲面亮度如下: \(I=\rho\sum\limits_{1\leq i\leq m} S_iI_in_i\cdot l_i\equiv \rho E(n)\) where \(S_i=\left\{\begin{matrix} 0, cannot\ be\ seen \\ 1, otherwise\end{matrix}\right.\)
其中 \(l_i\) 第 i 个光源照过来的角度,\(n\) 表示当前这个曲面的法向量,所以 \(n\cdot l_i\) 相当于余弦关系 ; \(I_i\) 表示第 i 个光源的亮度;\(S_i\) 表示曲面能不能被第 i 个点光源照到 ; \(\rho\) 表示曲面的材质
Expression ratio image: \(\dfrac{I'}{I}=\dfrac{E(n')}{E(n)}\) (\(\rho\) 一样,因为对同一个对象变换前后的材质是一样的 ) 简称 ERI
ERI 是因为曲面变形所导致的亮度的变化;不依赖于材质的。
假设在对应的点都有相同的法向量,材质不同,相同的形变
| Before deform | After deform | |
|---|---|---|
| Surface 1 | \(I_1=\rho_1E(n)\) | \(I_1^{'}=\rho_1E(n')\) |
| Surface 2 | \(I_2=\rho_2E(n)\) | \(I_2^{'}=\rho_2E(n')\) |
于是刚刚的问题转变为
| Neutral | Expression | |
|---|---|---|
| Person A | \(I_a=\rho_aE(n)\) | \(I_a^{'}=\rho_aE(n')\) |
| Person B | \(I_b=\rho_bE(n)\) | \(I_b^{'}=?\) |
由刚刚的推导可得 \(I_b^{'}=\dfrac{I_a^{'}}{I_a}I_b\)
Algorithm:
- mark feature points
- 对每一个特征点 \(v_b\) in B, warp it: \(v_{b'}=v_b+v_{a'}-v_a\), 令 \(B_g\) 是 B 变形后的图像
- 用 \(B_g\) 对齐 A A' 直到每个像素都能找到另外两种图像上的对应点
- 计算 ratio image \(\dfrac{A'}{A}\)
- \(B' = \dfrac{A'}{A} \cdot B_g\)
如何找像素的 coreespondence
通过图像对齐,手工标记特征点后进行参数化。