BiS-KM: 在 FPGA 上实现任意精度的 K-Means ¶
约 2486 个字 10 张图片 预计阅读时间 8 分钟
Abstract

- Paper: BiS-KM: Enabling Any-Precision K-Means on FPGAs
- ACM/SIGDA International Symposium on Field-Programmable Gate Arrays (FPGA), 2020
- 本文中的图片均来自论文。
介绍 ¶
K-Means 是一种流行的聚类算法。一个加速 K-Means 的方法:低精度,量化 quantization(归一化定点,将浮点数转为几位)
本文中要解决的问题是,我们是否可以使用量化数据来计算 K-Means,以及如何在 FPGA 上实现这一点。
量化数据的好处:
- 减少数据移动的开销:FPGA 通常受内存带宽限制,因此使用较低精度(如 8 位而非 32 位)应可减少从内存到 FPGA 的数据移动总量,从而缩短训练时间。
- 算术单元更小:量化数据要求相应算术单元的逻辑占用空间更小,这样我们就能在相同面积和功耗预算下实例化更多的算术单元。
量化数据的问题:
- 量化的开销:将数据从高精度转为低精度会带来大量的计算开销。
- 硬件开发:每个精度级别都需要一个单独的硬件加速器。
因此本文提出了 Bit-Serial K-Means (BiS-KM) 算法 - 软件 - 硬件协同设计方法,使 K-Means 能够在 FPGA 上支持任意精度聚类。
- K-Means 算法变体(C1)
- 定制的位串行(bit-serial)内存布局(C2)
- 位串行硬件加速器(C3)
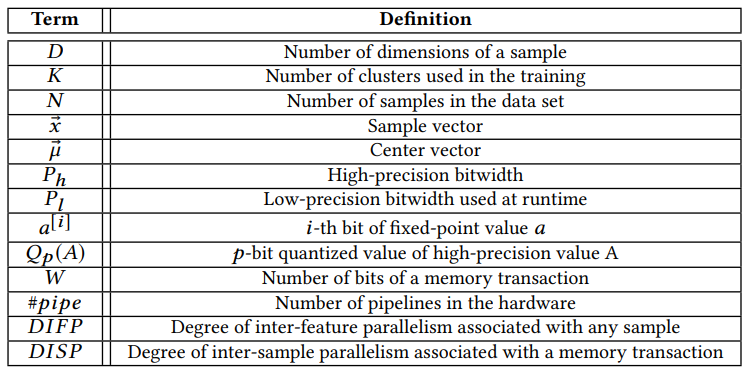
Notation in this paper
背景 ¶
K-Means 算法回顾略。
-
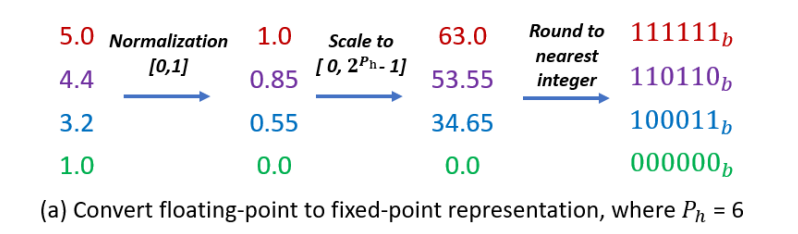
浮点数转化为定点数
假设一个数据点有 d 维,我们分别对每一维的数据 \(g\) 进行转化,\(P_h\) 是定点数的高精度位宽,\(g_{min}, g_{max}\) 是所有数据点中当前维数据的最小 / 最大值,公式如下:
\[ g' = \dfrac{g - g_{min}}{g_{max} - g_{min}} \times (2^{P_h} - 1) \]Example
-
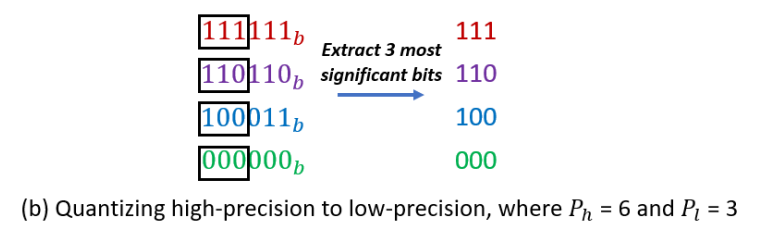
定点数量化
将高精度的定点数转化为低精度的定点数,直接截断高位即可。这里 \(a\) 是 \(P_h\) 位宽的定点数,用 \(P_l\) 表示低精度位宽。则有
\[ Q_p(a)=\sum\limits_{i=P_l}^{P_h-1}(a^{[i]}<<i) \]Example
位串行算术 ¶
BiS-MUL¶
一个 BiS-MUL 单元有两个输入:位串行输入和一个并行输入。每个周期,量化后的定点数会有一位进入 BiS-MUL 单元,然后与并行输入相乘,随后左移若干位,并与之前的结果相加。
Example
假设我们要计算 \(Q_3(a)\times b\),其中 \(a,b\) 均是 32 位精度的定点数。则等价于计算:
第 1 个周期计算的是 \((a^[31]\times b) << 31\),第 2 个周期计算的是 \((a^[30]\times b) << 30\),并加上第 1 个周期的结果,第 3 个周期计算的是 \((a^{[29]\times b} << 29)\),并加上前两个周期的结果。因此此时并行输入每 3 个周期更新一次。
则我们有下面的位串行算术单元:

注意到这里的乘法可以使用一个 Mux 来实现,将并行输入和全 0 掩码作为 Mux 的两个输入,位串行输入作为选择信号。
因此一个 BiS-MUL 单元可以通过一个 Mux 和一个移位加法(shift-and-add)逻辑来实现。
BiS-DP¶
最简单的实现是完全利用上面的 BiS-MUL 单元,将一个向量的每个元素与另一个向量的每个元素相乘,然后若干个周期后将结果送入加法树相加。这样的问题是加法树的利用率低,比如在上文的例子中,每 3 个周期才能产生乘法的结果,这样加法树的利用率只有 33.3%。
这里我们可以改变点积的计算顺序,使得乘法结果可以更快的送入加法树。假设每个数据有 \(D=4\) 维,其余输入与上面的例子相同。

第 1 个周期,我们把 \(a_0^{[31]}\times b_0, a_1^{[31]}\times b_1, a_2^{[31]}\times b_2, a_3^{[31]}\times b_3\) 送入加法树进行相加,并移位加上之前的结果。依次类推。经过 3 个周期即可得到点积的结果。
位串行的 K-Means 算法 ¶
相对距离 ¶
原始的 K-Means 算法实际上是要找到 \(\arg\min\limits_{i} \|Q(\vec x)-\vec \mu_i\|^2\),论文在 Sec4.1 分析了位串行欧氏距离的问题:
- 为了让带宽跑满,需要的 DSP 超过了 FPGA 的资源。
- 利用率低,因为每 \(1/P_l\) 个周期才会有一个位串行减法的结果,但是每个周期位乘法器都可以接收新的输入。
因此论文提出了基于相对距离的 K-Means 算法。
可以看到,我们可以使用 \(-Q(\vec x)\cdot \vec \mu_1 + 0.5\times\vec \mu_1^2+0.5\times \vec \mu_1^2\) 作为相对距离,其中 \(0.5\times \vec \mu_1^2\) 可以在每轮迭代开始时预先计算好。
BiS-KM 算法 ¶

可以看到,每轮迭代开始前,我们预先计算出 \(norm_i=\|\vec \mu_i^t\|^2\times 0.5\)。在计算相对距离中的点积 \(Q(\vec x)\cdot \vec \mu_i^t\),以及最后更新聚类中心 \(\vec \mu_i^t = \dfrac{sum_i}{cnt_i}\) 使用的是高精度的定点数。
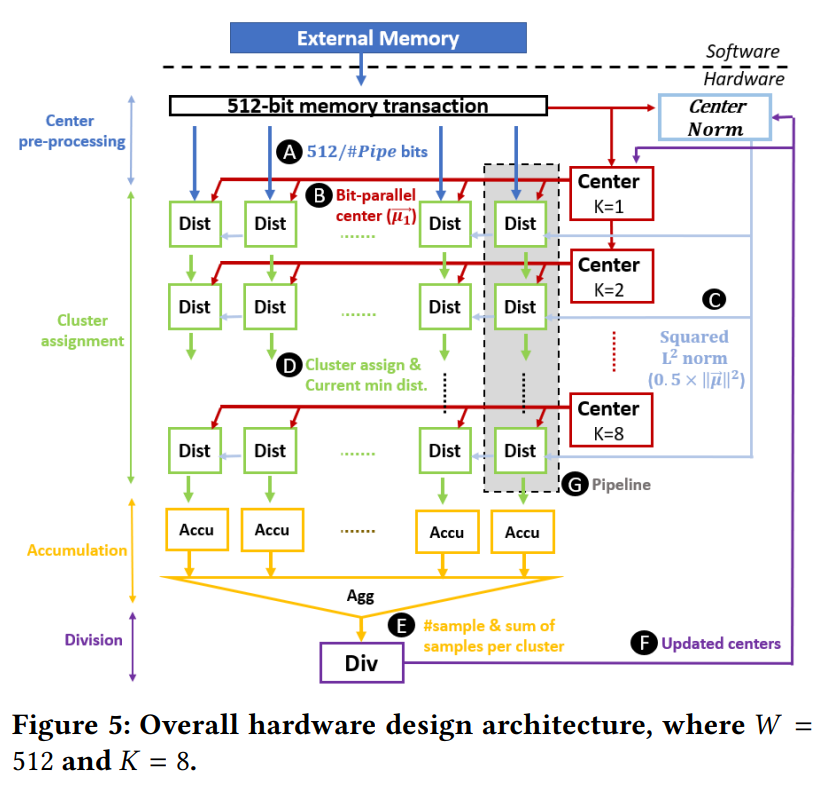
BiS-KM 系统 ¶
设计的目标是每个周期都能消费一个 W 位的内存事务。即每个周期会有 W 位数据从外部内存进入 BiS-KM 系统,我们在这个周期内可以让所有的数据进入处理阶段。
聚类数 K 和数据维度 D 可以在运行时动态配置。但 K 和 D 的最大值在设计时就已经固定下来了。
-
中心预处理:
- 第一次迭代开始时,该模块会加载簇的初始中心点(从外部内存中
) ,每个初始的簇中心会被送到相应的片上存储器中。同时初始的簇中心也会被送到 Center Norm 模块中计算 \(L^2\) 范数。 - Center Norm 模块由位并行乘法器(通过片上 DSP 块组成,不是位串行乘法器)和加法树构成,可以并行计算所有簇中心的 \(L^2\) 范数。
- 第一次迭代开始时,该模块会加载簇的初始中心点(从外部内存中
-
聚类赋值
- 采样数据必须等待所有中心数据都存储到中心模块中,然后在中心预处理模块中进行平方 \(L^2\) 范数计算。
- 共有 \(\#Pipe\) 条流水线,每条流水线有一个 Dist 距离模块序列(8 个 Dist 模块,对应至多 8 个中心模块
) ,对应处理一个数据点 \(Q(\vec x)\)。- Dist 模块有两个输入,一个是 \(\dfrac{512}{\#Pipe}\) 位的串行输入,另一个是中心模块的值 \(\vec\mu\)。
- Dist 模块首先通过位串行算术模块计算出点积,随后减去 \(L^2\) 范数得到相对距离,最后将距离送入比较器,与之前的最小距离比较,如果距离更小就更新。
-
累积
- 部分累加模块(Accu
) :将位串行数据重新分组为并行数据,并按坐标累加。同时统计每个簇的数据点个数。 - 全局聚合模块(Agg)
- 部分累加模块(Accu
-
除法
- 执行定点除法,得到新的簇中心,传到 Center Norm 模块和中心模块中。
- 最后一次迭代结束后,新的簇中心会被送到外部内存中。
位串行算术与内存布局 ¶
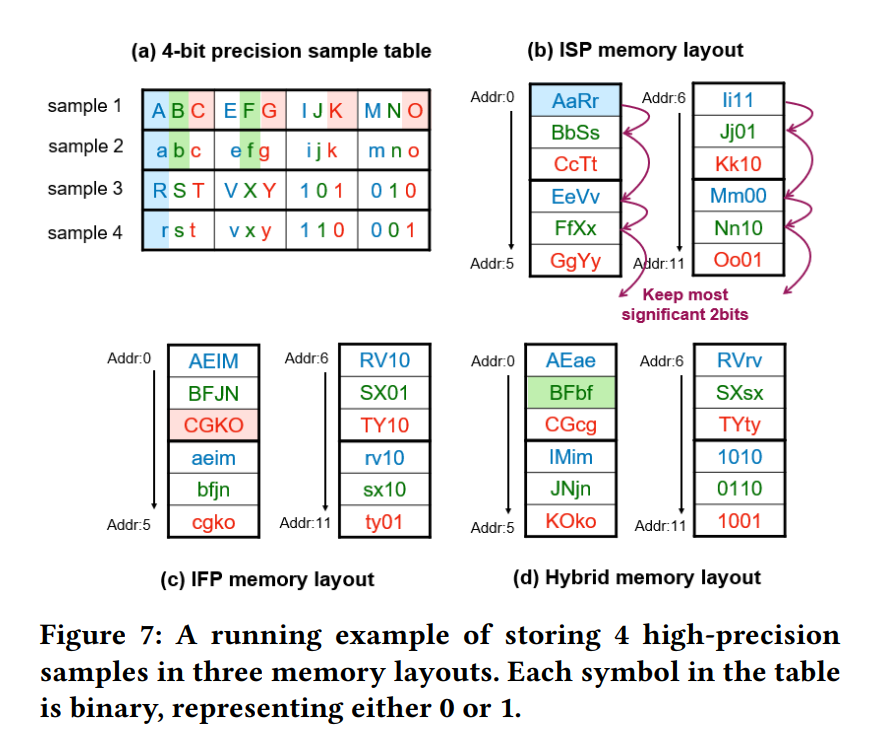
对于位串行内存布局,我们有下面几种方式:
- ISP (Inter-sample parallelism):内存事务的每位都来自不同的数据点。
- IFP (Inter-feature parallelism):内存事务的每位都来自同一个数据点的不同特征。
- hybrid:综合了 ISP 和 IFP。内存事务中有 DISP 个数据点,其中每个数据点有 DIFP 个特征。
Example
假设 \(D=4, P_h=3, W=4\)。则 ISP、IFP 和 hybrid 的内存布局如下:
BiSKM 系统中的 Dist 模块中的 Bit-Serial Arithmetic 部分,对于不同的位串行布局,有不同的实现:

论文中分析到
- ISP 可以实现任意精度的检索,但需要过多的 BiS-MUL。
- IFP 要求中心模块和 Dist 模块的 path 位宽很大(\(W\times P_h=512\times 32\)
) ,同时 IFP 要求数据点的维度很大,否则我们需要填充很多位来让数据维数达到 512 的倍数。 -
Hybrid 模型下,我们需要实例化 DISP 个 BiS-DP 单元,每个 BiS-DP 单元处理 DIFP 位输入(每一位输入来自同一个数据点的不同特征
) 。注意到如果 \(D>DISP\) 时,需要多个周期才能处理完一个数据点的所有特征的一个比特,随后再处理下一个比特。
实验 ¶
论文使用了 OpenStreetMap、Forest、Gas 和 Epileptic 四个数据集,从硬件效率(吞吐量
-
BiS-KM 能够在 FPGA 上高效支持任意精度聚类。
当数据集的维数是 DIFP=16 的倍数时,BiS-KM 的吞吐量大致达到理论内存带宽。
-
BiS-KM 所实现的低精度聚类可以保持统计效率。
- FPGA 上实现的 BiS-KM 可以与 14 个内核竞争,表明所建议的方法是可行的,并具有优势。
结论 ¶
BiS-KM 设计用于在低精度数据上灵活计算 K-Means。该设计采用了新的 K-Means 算法、为 K-Means 计算量身定制的新颖内存布局,以及使用位串行算法与 FPGA 的高效映射。BiS-KM 能够从紧凑型存储器中检索任意精度数据,并在单一设计中支持任意精度聚类。与最先进的硬件 32 位精度解决方案相比,BiS-KM 在精度较低的情况下几乎实现了线性提速,其性能优于在多核 CPU 上运行的 K-Means。