Scheduling¶
约 2359 个字 6 行代码 19 张图片 预计阅读时间 8 分钟
CPU Scheduling¶
Definition: The decisions made by the OS to figure out which ready processes/threads should run and for how long.
谁用?用多久?
-
The policy is the scheduling strategy
怎么选择下一个要执行的进程。
-
The mechanism is the dispatcher
怎样快速地切换到下一个进程。
CPU-I/O Burst Cycle¶
-
I/O-bound process
主要是等 I/O。大部分的操作都是 I/O-bound 的。
e.g.
/bin/cp -
CPU-bound process
主要是等 CPU。
e.g. 科学计算(如把圆周率计算后一百万位
) ,渲染
The CPU Scheduler¶
当 CPU 空闲时,从所有的 ready processes 中选一个继续跑。
-
Non-preemptive scheduling: a process holds the CPU until it is willing to give it up.
非抢占式,它一直占着 CPU,直到它自己放弃。
-
Preemptive scheduling: a process can be preempted even though it could have happily continued executing.
抢占式,CPU 决定每个进程能跑多久,可以强制中止正在跑的进程。
操作系统中一般使用抢占式的(否则操作系统就不太需要做调度了)
Scheduling Decision Points¶
Scheduling decisions can occur
-
A process goes from RUNNING to WAITING
e.g. waiting for I/O to complete
-
A process goes from RUNNING to READY
e.g. when an interrupt occurs (such as a timer going off)
-
A process goes from WAITING to READY
e.g. an I/O operation has completed
-
A process goes from RUNNING to TERMINATED
- A process goes from NEW to READY
- A process goes from READY to WAITING
在非抢占式的情况中,只有第二种情况不会发生。在抢占式的情况中,所有的情况都会发生。
Preemptive scheduling is good, since the OS remains in control, but is complex.
Scheduling Mechanisms¶
Scheduling Queues¶
- The Ready Queue contains processes that are in the READY state
-
Device Queues contain processes waiting for particular devices
每个被等待的 devices 都有一个 device queues, 通过双向链表连接。
Example

比如这里,我们将进程 2 运行,就将它从 ready queue 里拿出来。随后如果他要读硬盘,我们就把 PCB2 挂载到 disk unit 0 的 device queue 上。
Example

parent call fork 之后,子进程进入 ready queue。如果父进程使用了 wait,他就会被放到子进程的 waiting queue 里(实际上每个被等待的对象都有一个 waiting queue
当 CPU 再次被父进程拿到时,它会回收子进程这个 zombie。
Dispatcher¶
Dispatcher module gives control of the CPU to the process selected by the scheduler.
-
switching to kernel mode
kernel_entry, 用户态的信息存在pt_regs中。 -
switching context
上下文存在 PCB 中。
-
switching to user mode
- jumping to the proper location in the user program to restart that program
Dispatch latency – time it takes for the dispatcher to stop one process and start another to run.
这是 pure overhead,因为 CPU 没有做实际的工作。

Scheduling Algorithms¶
Scheduling Objectives
- Maximize CPU Utilization
- Maximize Throughput
-
Minimize Turnaround Time
周转时间,指进程从创建到完成的时间。
-
Minimize Waiting Time
-
Minimize Response Time
响应时间,指进程从创建到第一次响应被接受的时间。
我们很难说一个算法怎样才是好的(上述的目标实际上互相之间是有矛盾的
One thing is certain: the algorithms cannot be overly complicated so that they can be fast.
即算法不要过于复杂。
用下面的指标来衡量算法的好坏:
- CPU utilization – keep the CPU as busy as possible
- Throughput – # of processes that complete their execution per time unit
- Turnaround time – amount of time to execute a particular process
- Waiting time – amount of time a process has been waiting in the ready queue
- Response time – amount of time it takes from when a request was submitted until the first response is produced, not output (for time sharing environment)
First-Come, First-Served Scheduling (FCFS)¶
- Waiting time = start time – arrival time
- Turnaround time = finish time – arrival time
Example


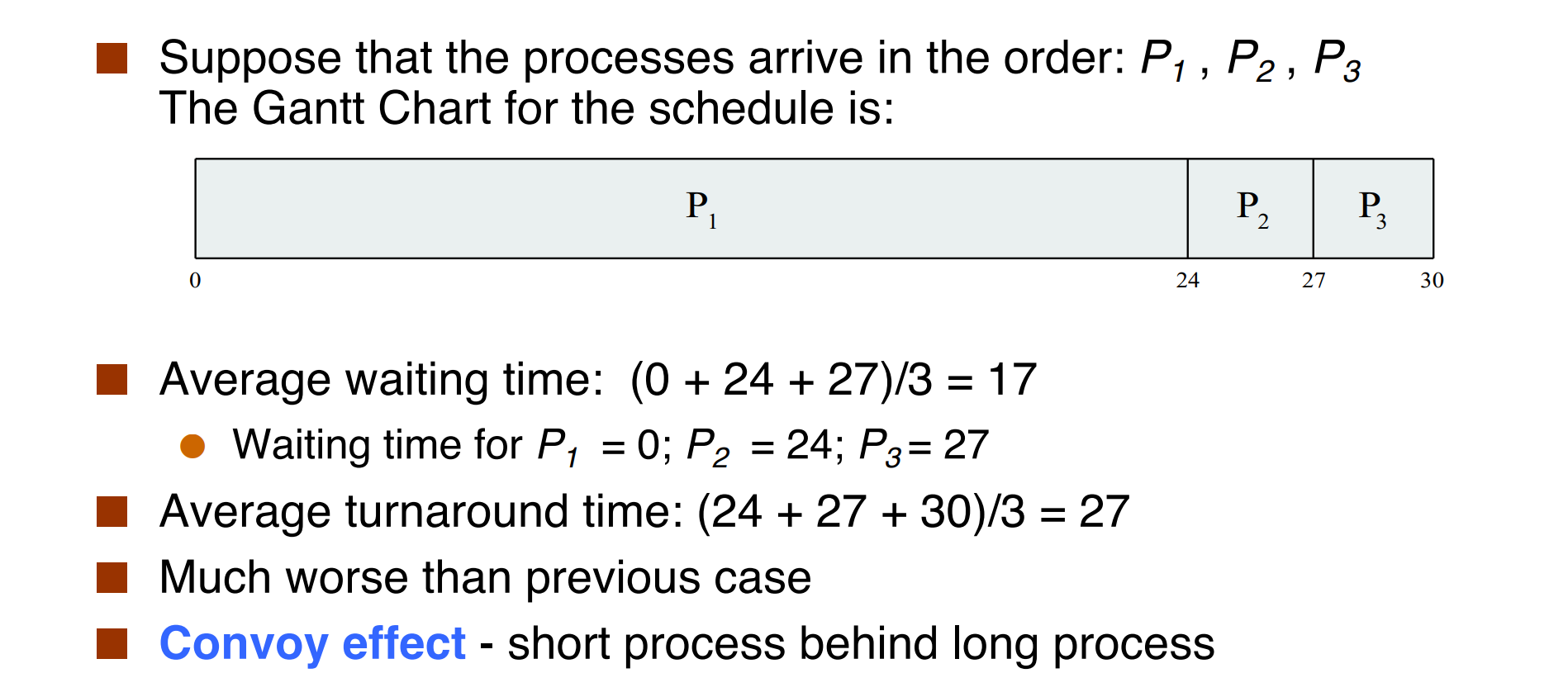
Convoy effect - short process behind long process
慢车在快车后面,所有车都在后面等着。
Shortest-Job-First (SJF) Scheduling¶
Use these lengths to schedule the process with the shortest time.
Example
注意分为抢占式和非抢占式的!
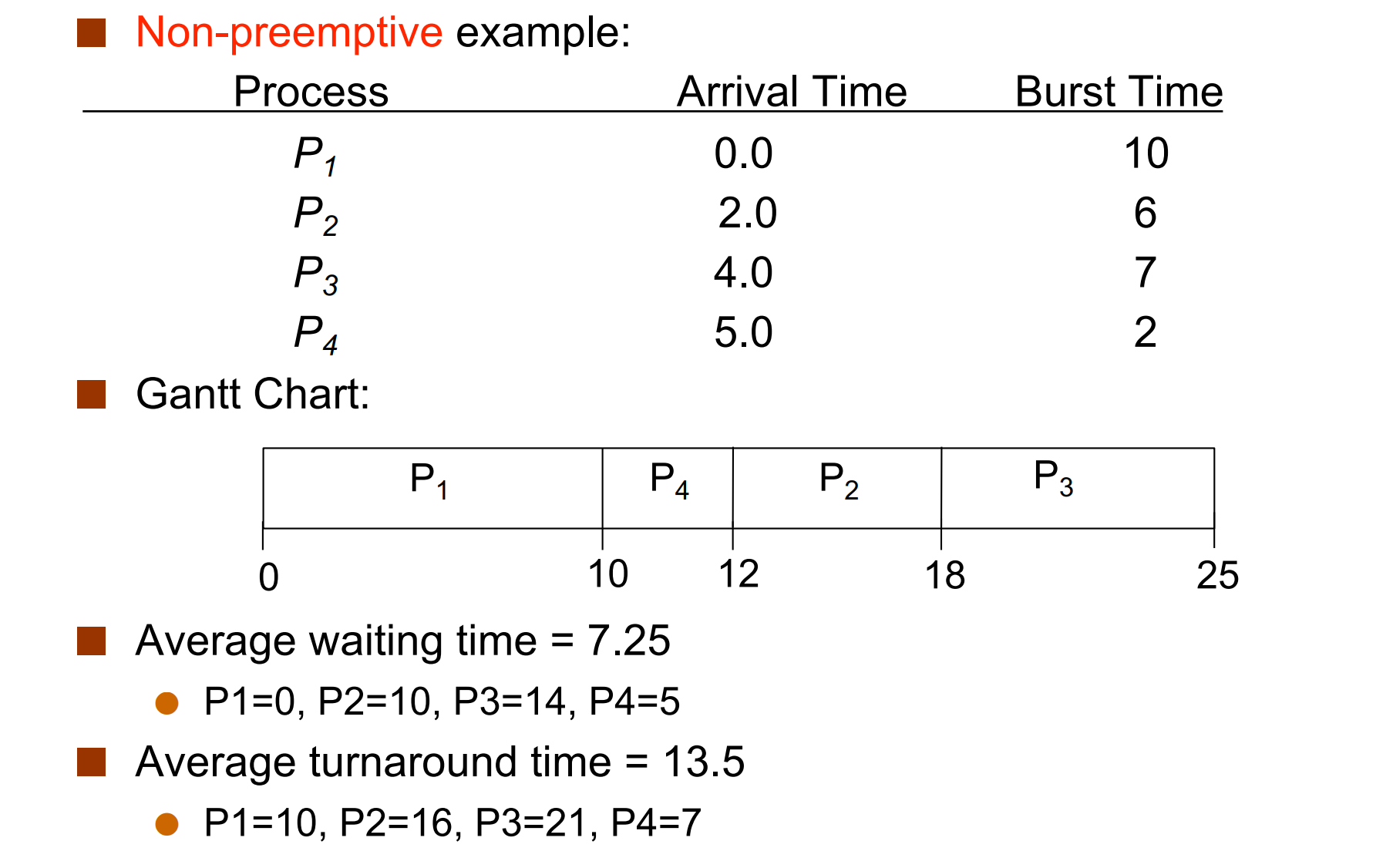
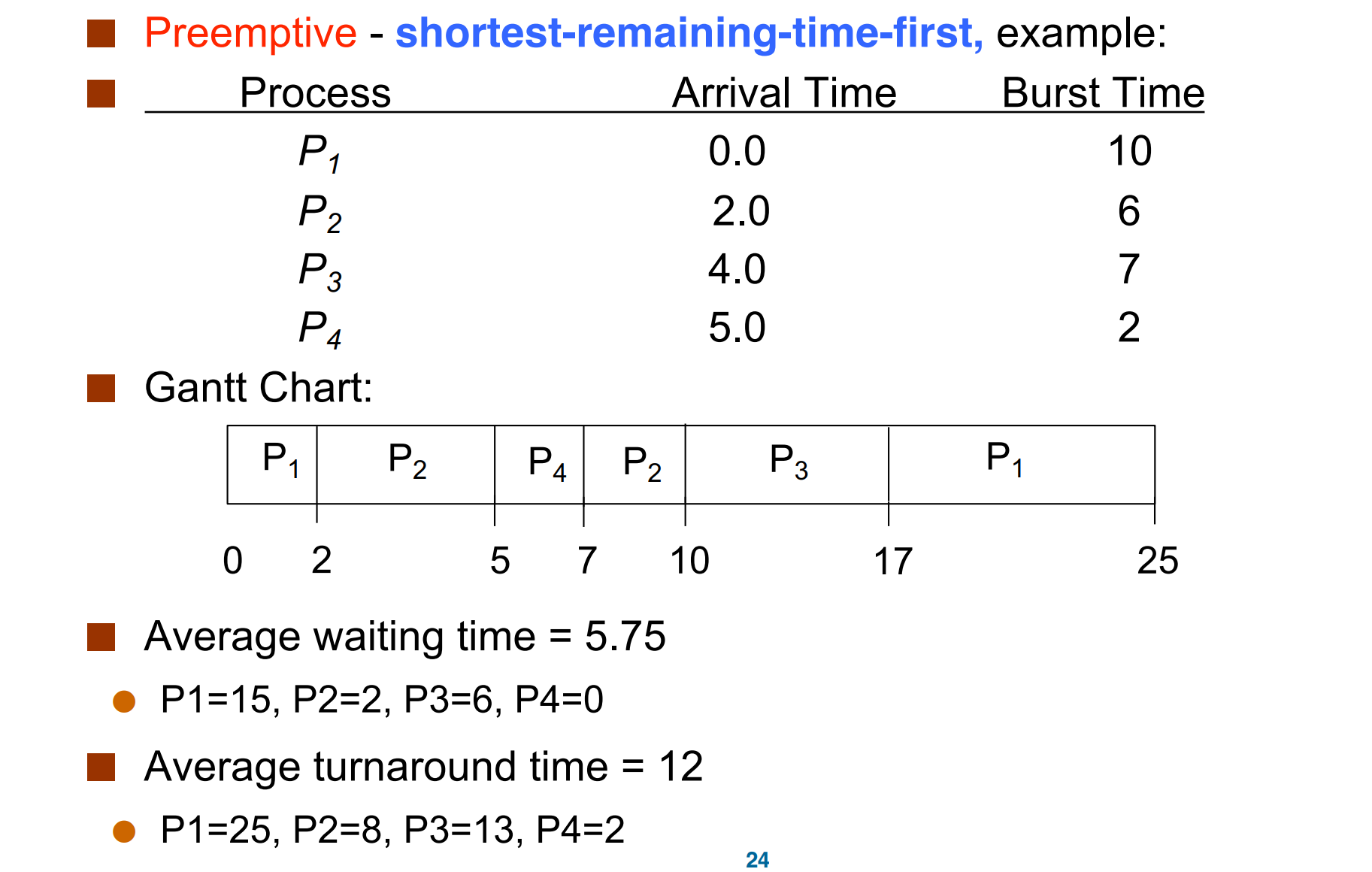
有多段的执行,等待时间我们要计算这个进程在执行结束前,有多少时间没有被执行,即 25-10=15。
SJF is provably optimal for average wait time
但我们执行一个任务之前,我们如何知道一个任务需要多长时间
Predicting CPU burst durations¶
根据之前的时间,预测一个进程的下一次执行时间:\(\tau_{n+1}=\alpha t_n + (1-\alpha)\tau_n\)

Round-Robin Scheduling¶
RR Scheduling is preemptive and designed for time-sharing.
给进程一个固定时间片,用完了就跑到 ready queue 末尾排队。
Ready Queue is a FIFO. Whenever a process changes its state to READY it is placed at the end of the FIFO.
Scheduling:
- Pick the first process from the ready queue
- Set a timer to interrupt the process after 1 quantum
- Dispatch the process
Example
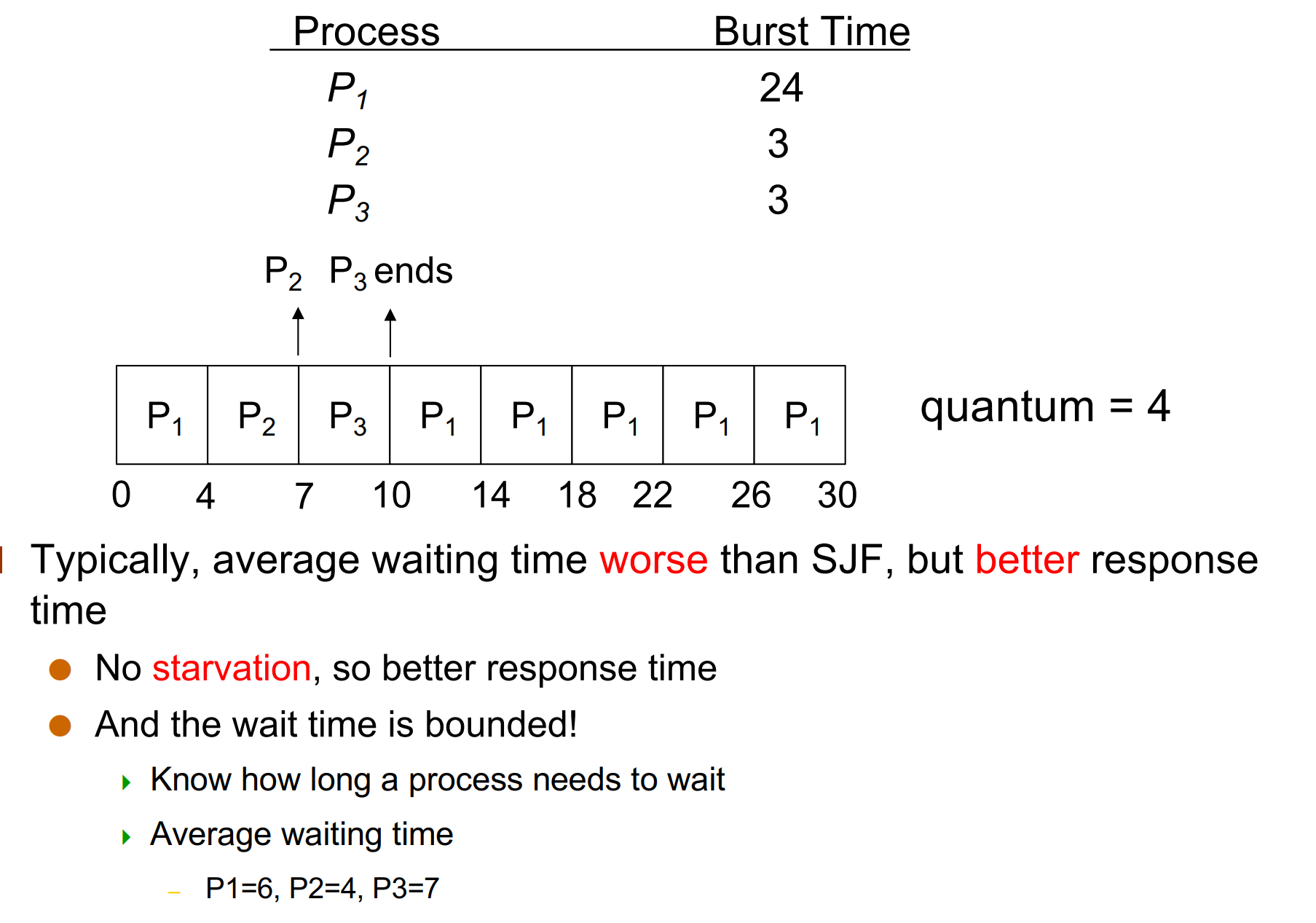
-
No starvation, so better response time
在 SJF 中,如果不停的有时间短的进程进来,那么长进程就可能永远无法执行,称为 starvation。
-
The wait time is bounded.
- Trade-off
- Short quantum: great response/interactivity but high overhead
- Long quantum: poor response/interactivity, but low overhead
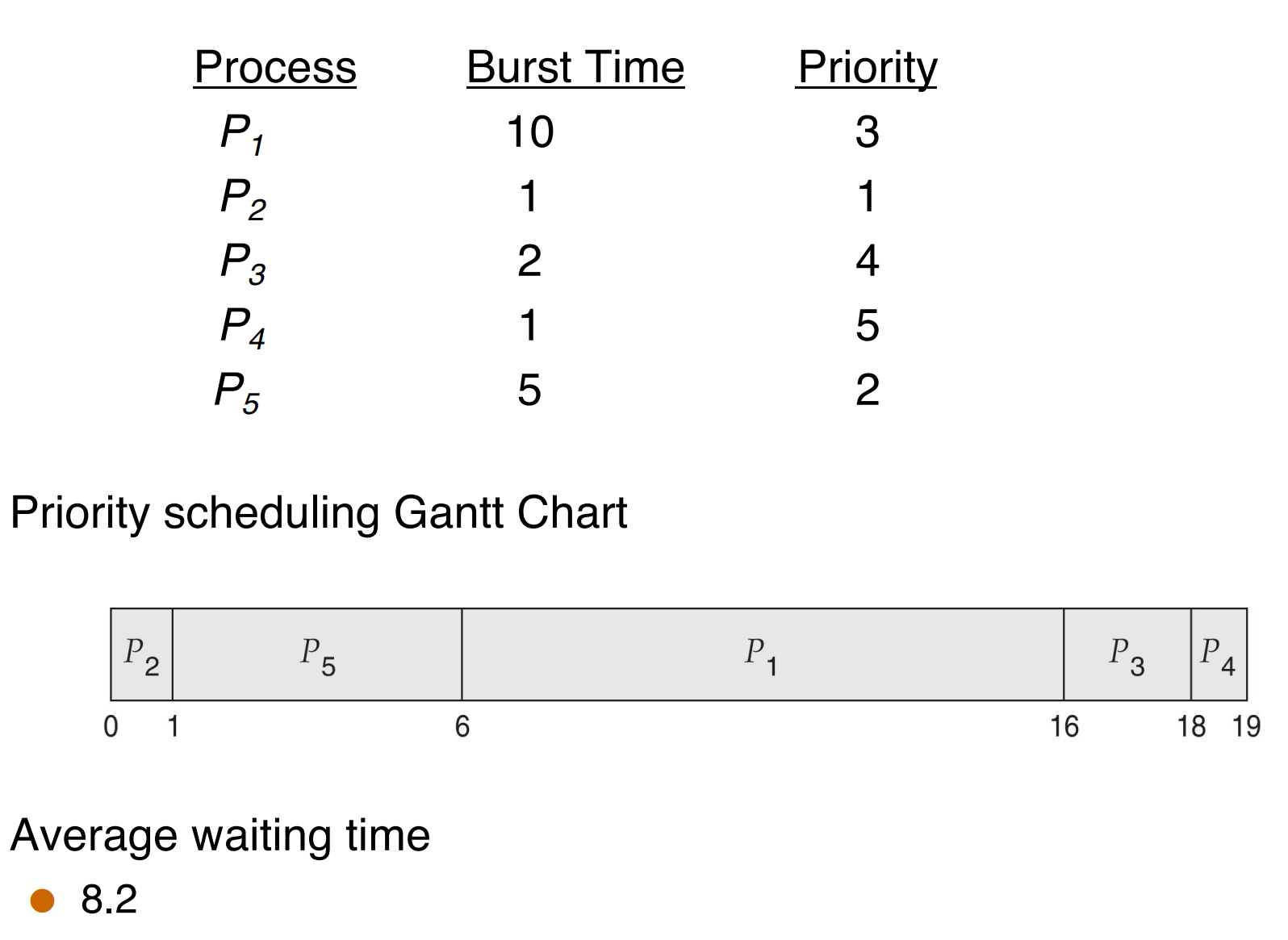
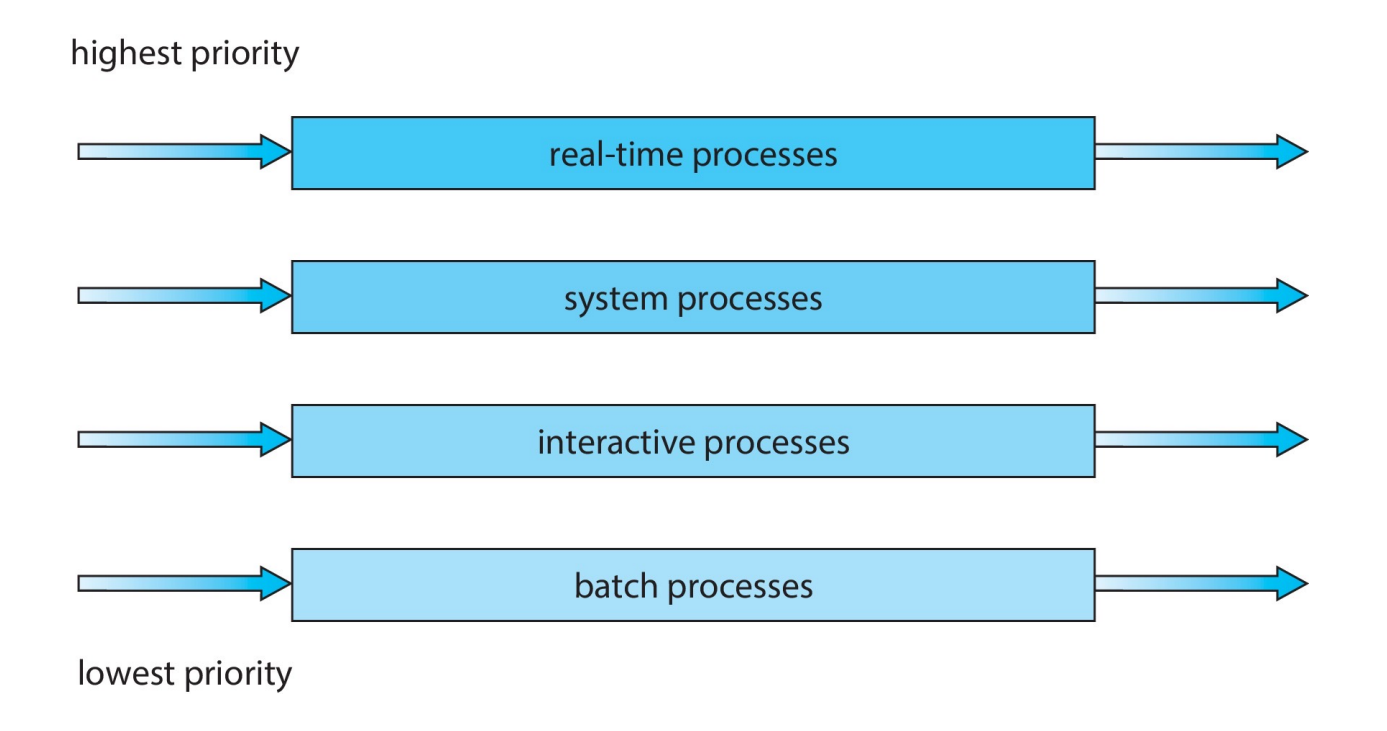
Priority Scheduling¶
优先级高的先被调度,优先级低的后被调度
-
Priorities can be internal.
e.g. in SJF it’s the predicted burst time, the number of open files.
-
Priorities can be external.
e.g. set by users to specify relative importance of jobs.
Example
Example
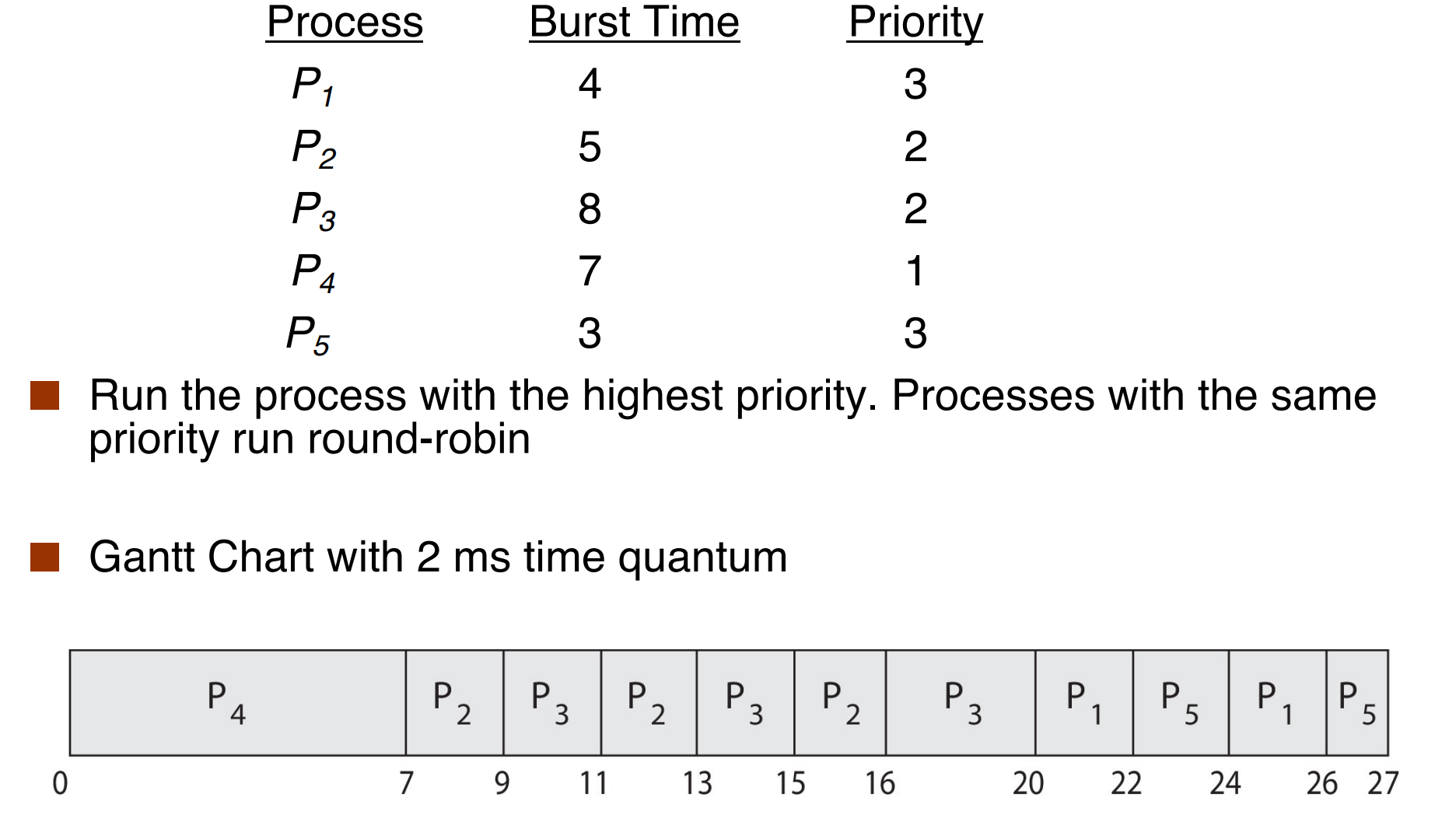
为了实现优先级调度,我们可以使用优先队列来代替队列。
存在问题:优先级低的进程可能永远无法执行,即 starvation。
A solution: Priority aging
- Increase the priority of a process as it ages
Multilevel Feedback Queues¶
- use one ready queue per class of processes.
- Scheduling within queues
- Each queue has its own scheduling policy
一个队列里用一种调度方法,不同的队列里可以用不同调度方法。
Processes can move among the queues.
Example
有三层队列,第一、二层是 Round-Robin。来了一个进程先放到第一个队列里准备执行,如果没执行完就放到第二个队列里,如果还没执行完就放到第三个队列里 FCFS。
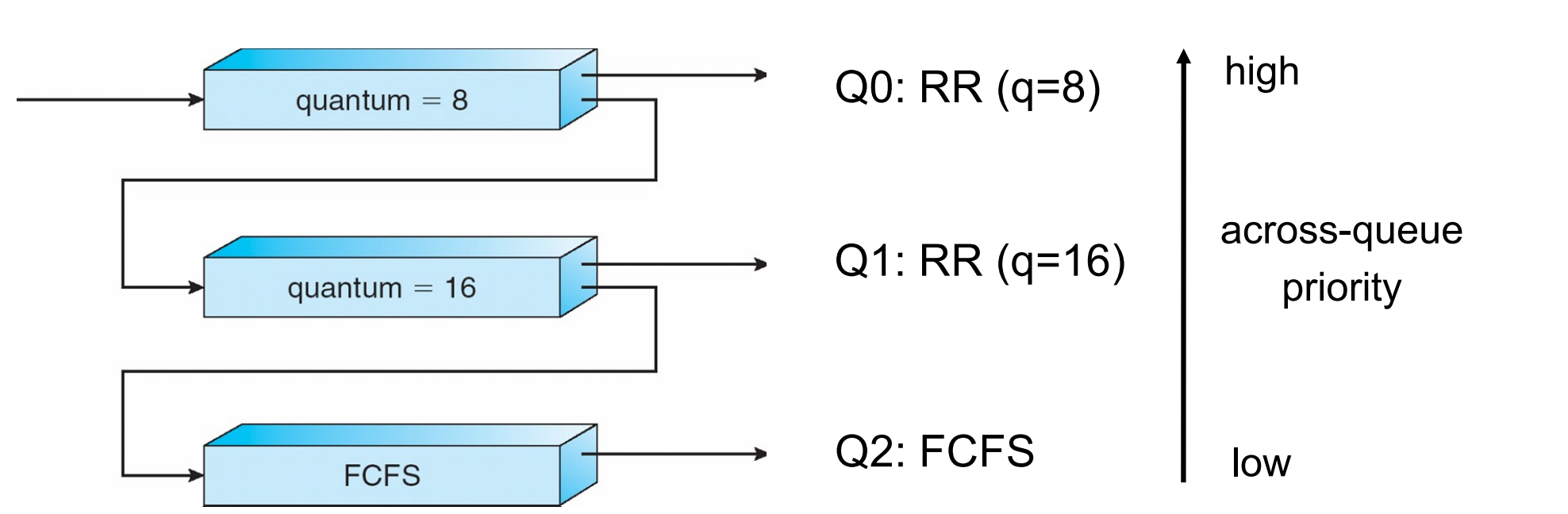
如果最开始在 Q0 就执行完了,很可能是 I/O bound 的进程,我们把它的优先级设的很高;否则可能是 CPU-bound 我们就降低它的优先级。
Rationale: non-CPU-intensive jobs should really get the CPU quickly on the rare occasions they need them, because they could be interactive processes (this is all guesswork, of course).
非 CPU-intensive 的进程应该尽快得到 CPU,因为它们可能是交互式进程。
可以做的比较通用。
The Multilevel Feedback Queues scheme is very general because highly configurable
- Number of queues
- Scheduling algorithm for each queue
- Scheduling algorithm across queues
- Method used to promote/demote a proces
Thread Scheduling¶
-
process-contention scope (PCS)
每个进程分到时间片一样,然后进程内部再对线程进行调度。
-
system-contention scope (SCS)
所有线程进行调度。
现在主流 CPU 都是以线程为粒度进行调度的。
Multiple-Processor Scheduling¶
Multi-processor may be any one of the following architectures:
- Multi-core CPUs
- Multi-threaded cores
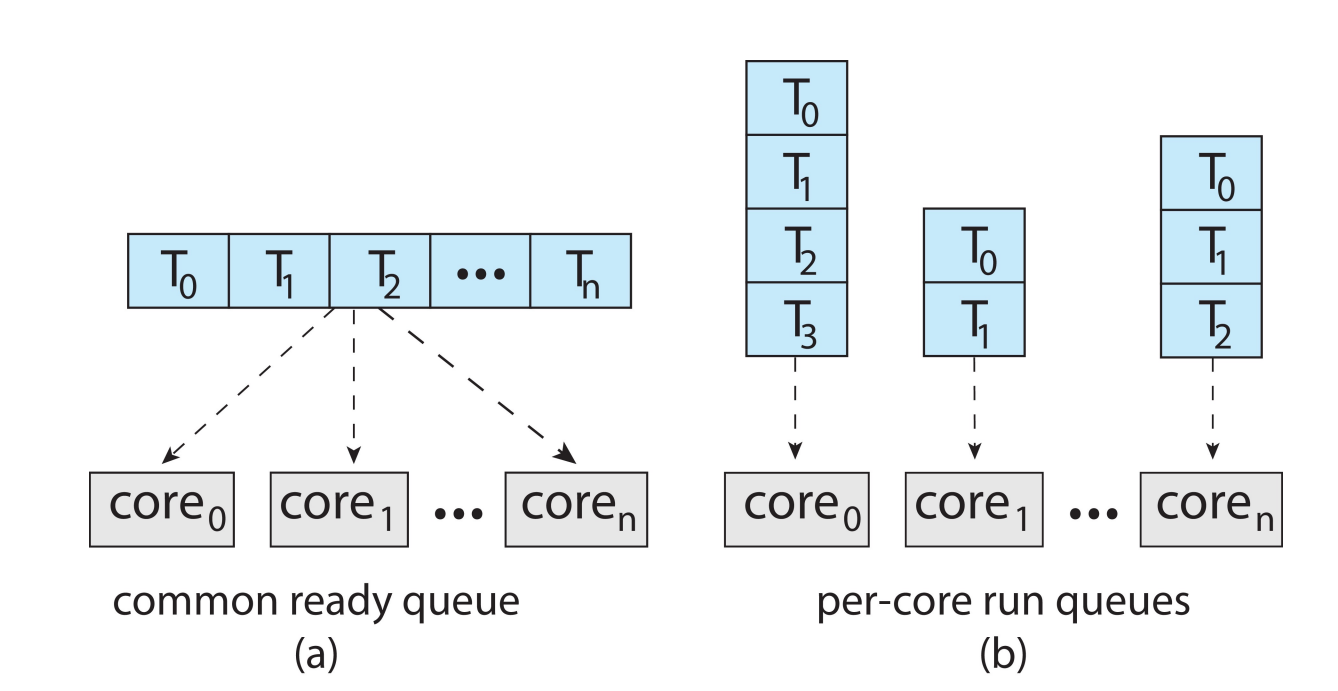
Multithreaded Multicore System¶
- All threads may be in a common ready queue (a)
-
Each processor may have its own private queue of threads (b)
现在大部分是这种架构。
CPU 中计算单元很快,但是内存访问是很慢的,需要 stall。为了利用这段 stall 的时间,我们就多用一个 thread,在这个 thread stall 时执行另一个 thread

Chip-multithreading (CMT) assigns each core multiple hardware threads. (Intel refers to this as hyperthreading.)

hyperthreading 属于硬件线程,由硬件来调度,不同于 OS 里的 thread。
Multiple-Processor Scheduling¶
Load Balancing¶
- Load balancing attempts to keep workload evenly distributed
-
Push migration – periodic task checks load on each processor, and if found pushes task from overloaded CPU to other CPUs.
core 上工作太多,要推给其他的 core。
-
Pull migration – idle processors pulls waiting task from busy processor.
core 上工作太少,就从其他的 core 上拉一些任务过来。
Processor Affinity¶
有的进程我们想要在一个 core 上跑。
- Soft affinity – the operating system attempts to keep a thread running on the same processor, but no guarantees.
- Hard affinity – allows a process to specify a set of processors it may run on.
Linux Scheduling¶
- Nice command
- 数越小,优先级越高
ps -e -o uid,pid,ppid,pri,ni,cmd
Linux Scheduling: 0.11
Round-Robin + priority.
第一个红框 \(O(N)\) 找 counter 最大的进程,如果 counter 不为 0 就执行,否则说明所有的进程都已经跑完自己的时间片了,重新赋值时间片,按照优先级赋值。(当时数越大,说明优先级越高,后来相反了)
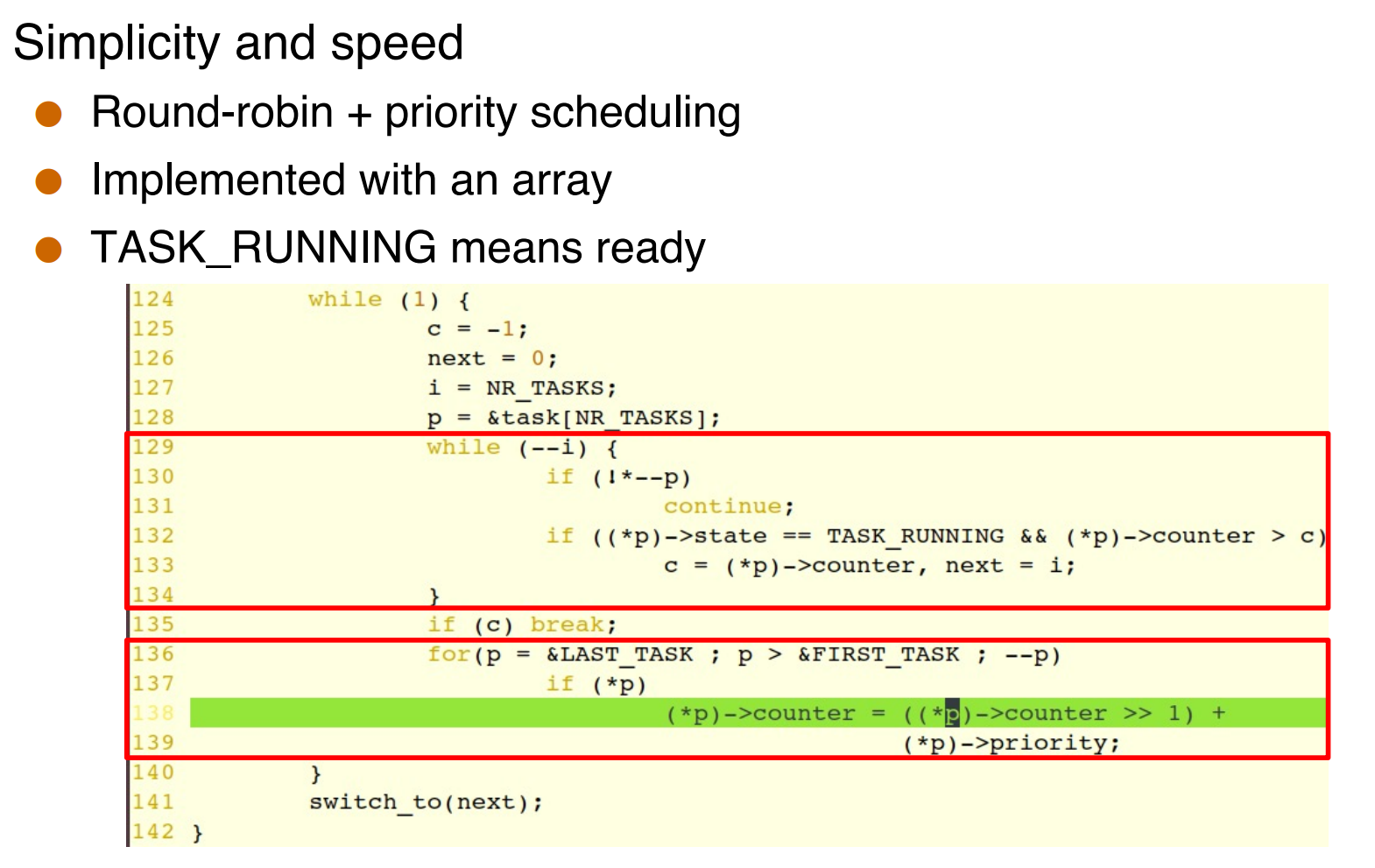
每次找进程都要 \(O(N)\),后来改为了 \(O(1)\) 的算法(Linux 2.6)
The kernel keeps two arrays of round-robin queues
- One for active tasks: one Round Robin queue per priority level
- One for expired tasks: one Round Robin queue per priority level
每个优先级都对应一个数组,每个数组里有一个 Round Robin 队列。

struct prio_array {
int nr_active; // total num of tasks
unsigned long bitmap[5]; // priority bitmap
struct list_head queue[MAX_PRIO]; // the queues
}
The bitmap contains one bit for each priority level.
bitmap 存哪个优先级里还有元素,最开始所有位都是 0,如果有优先级里有进程,就把对应的位设为 1。找优先级最高的就是从左往右遍历,找到第一个 1 的位。x86 上正好有一个指令 bsfl(bit scan forward - from right to left)可以直接找到对应的位,然后再从对应的 task_list 取出一个进程。
一个任务执行完它的时间片后,就从 active array 移到 expired array。当 active array 为空时,就把 expired array 和 active array 交换。
问题在于:优先级数量受限制;而且 policy 和 mechanism 紧密绑定,难以维护,所以后来没有继续使用。
CFS: Completely Fair Scheduler
- Developed by the developer of \(O(1)\), with ideas from others
- Main idea: keep track of how fairly the CPU has been allocated to tasks, and “fix” the unfairness
- For each task, the kernel keeps track of its virtual time
- The sum of the time intervals during which the task was given the CPU since the task started
- Could be much smaller than the time since the task started
- Goal of the scheduler: give the CPU to the task with the smallest virtual time. i.e., to the task that’s the least "happy"
Takeaway¶
Takeaway
- There are many options for CPU scheduling
- Modern OSes use preemptive scheduling
- Some type of multilevel feedback priority queues is what most OSes do right now
- A common concern is to ensure interactivity
- I/O bound processes often are interactive, and thus should have high priority
- Having “quick” short-term scheduling is paramoun