Image Feature¶
约 2188 个字 17 张图片 预计阅读时间 7 分钟
Abstract
- Image feature
- Image matching
- Feature detection
- Harris operator
- Invariance
- Scale Invariant Feature Transform (SIFT)
Image Matching¶
做图像拼接 : 检测两张图象的特征点,找到对应的点对,用这些点对对齐图像
Feature detection¶
提取出局部的具有几何不变性的特征
怎样找到一个好的特征? ——找到一个非同寻常的区域
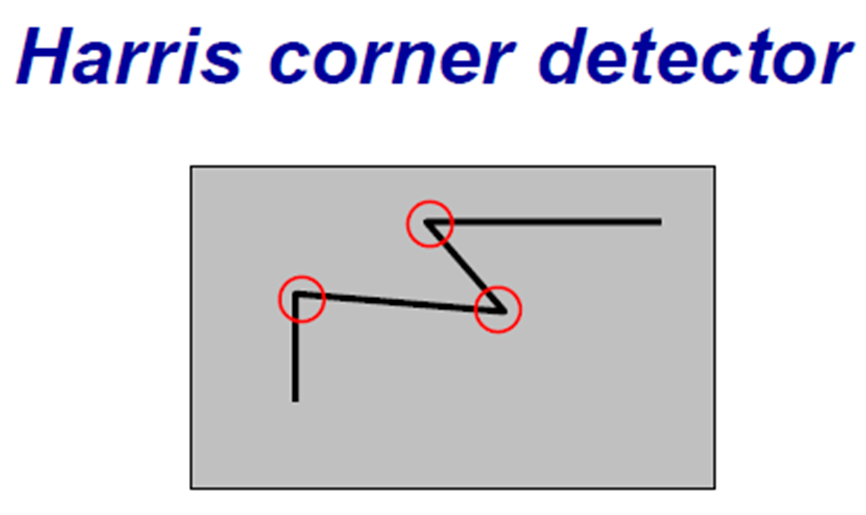
我们考虑一个小窗口的像素
- flat: 在任何方向都不会有像素的改变
- egde: 沿着边的方向不会有像素的改变
- corner: 在任何方向都会有明显的改变
量化窗口像素的变化 : \(W\) 表示窗口,\((u,v)\) 表示方向
\(E(u,v)=\sum\limits_{(x,y)\in W}[I(x+u,y+v)-I(x,y)]^2\)
泰勒展开:
\(I(x+u,y+v)-I(x,y)=\dfrac{\partial I}{\partial x}u + \dfrac{\partial I}{\partial y}v + higher\ order\ terms\)
如果移动 \((u,v)\) 小,那么可以用一阶微分估计 \(I(x+u,y+v)-I(x,y)\approx \dfrac{\partial I}{\partial x}u + \dfrac{\partial I}{\partial y}v=\left[\begin{matrix}I_x & I_y \end{matrix}\right]\left[\begin{matrix}u \\ v \end{matrix}\right]\)
将式子带入之前的公式得到
沿着矩阵 \(H\) 的两个特征向量,变化最大。
\(\lambda_{+}, \lambda_{-}\) 比较大时,这是一个好的位置(因为沿各个方向的变化都较大)

一个大一个小 : \(edge\); 两个都小 : \(flat\)
Feature Detection
- 计算图像中每个点的梯度
- 通过梯度得到每个 windows 的 \(H\) 矩阵
- 计算特征值
- 找到相应较大的点 (\(\lambda_- > Threshold\))
- 选择那些 \(\lambda_-\) 是局部极大值的点作为特征
The Harries operator¶
\(\lambda_-\) 是 Harries operator 用于特征检测的变体
- \(trace(H)=h_{11}+h_{22}\)
- 这就是 “Harris Corner Detector” or “Harris Operator”, 这个算子得到的是一个响应值
Some properties¶
- 旋转不变性
椭圆旋转,但长轴短轴的形状不变,特征值也不变 - 对图像强度改变
- 对加法和数乘强度变化保持不变 \(I\rightarrow I+b,I\rightarrow aI\)
极值点不变 - 图像尺度变化会有影响!

- 对加法和数乘强度变化保持不变 \(I\rightarrow I+b,I\rightarrow aI\)
Scale Invariant Detection¶
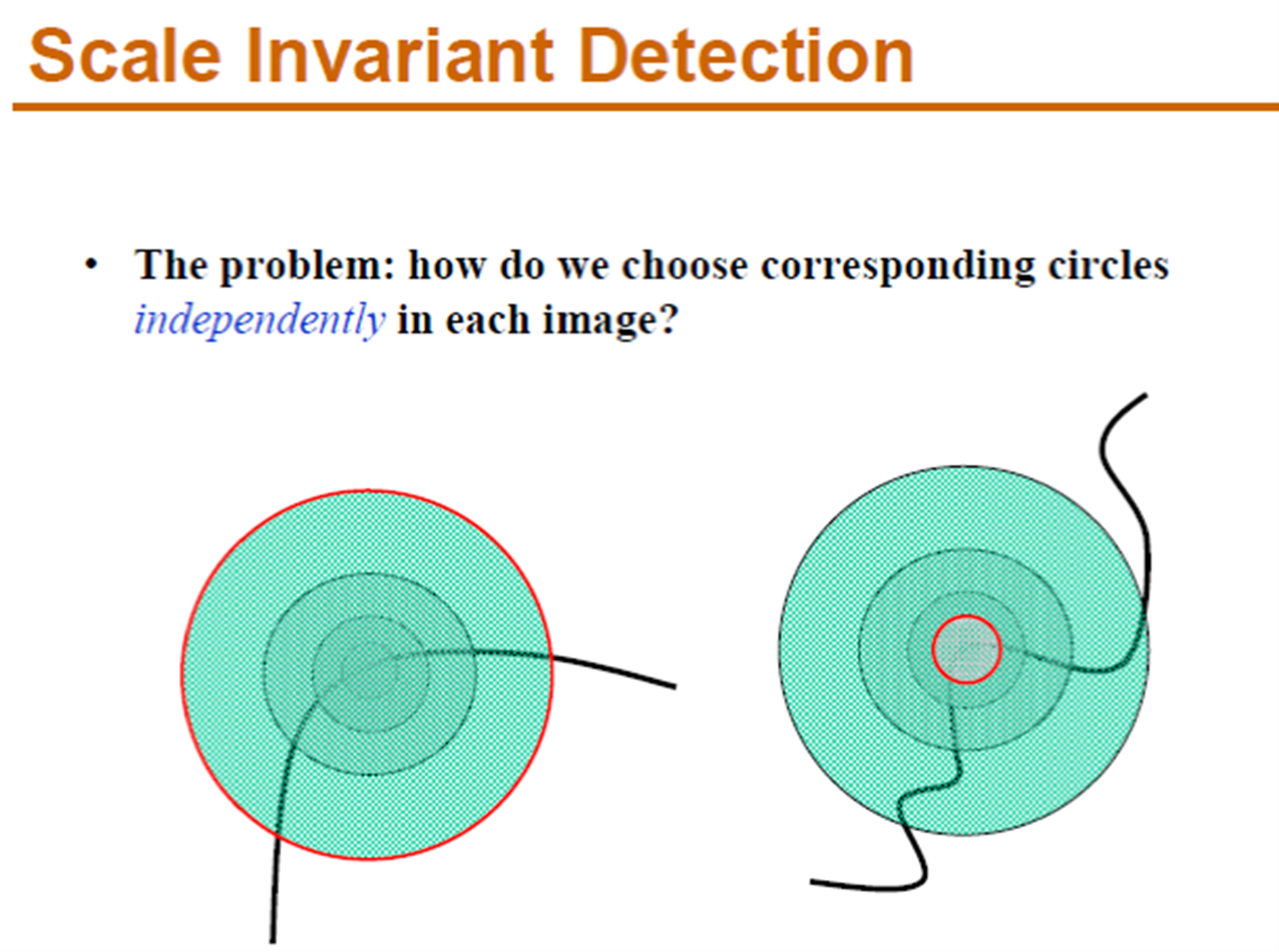
在区域内设计一个比例不变的函数
在不同的图像 ( 比例不同 ),极值点在同一个位置出现
a. edge, 没有极值点 b. 好几个极值点 不知道是哪个 c. good
能筛掉前两种
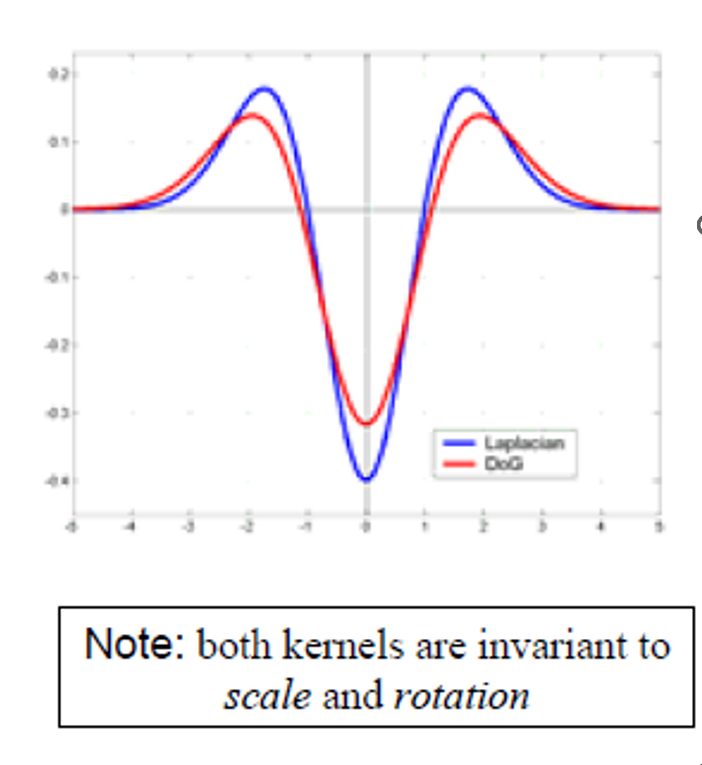
二者思路相同 , kernal 略有差异
\(f=Kernal * Image\)
kernals:
- \(L=\sigma^2(G_{xx}(x,y\sigma)+G_{yy}(x,y,\sigma))\)
- \(DoG=G(x,y,k\sigma)-G(x,y,\sigma)\) 其中 \(G(x,y,\sigma)=\dfrac{1}{\sqrt{2\pi}}e^{-\frac{x^2+y^2}{2\sigma^2}}\)
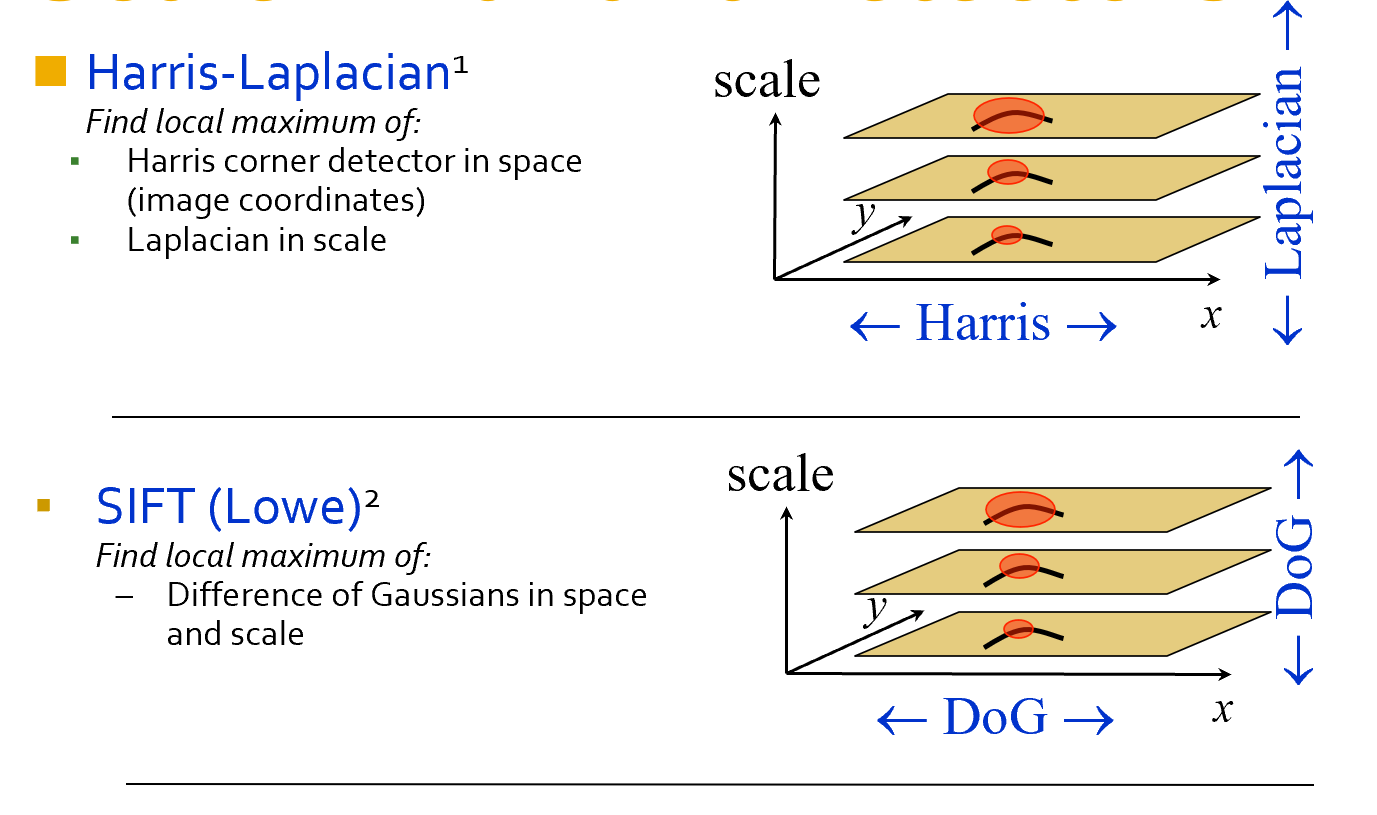
Harris-Laplacian¶
不同维度计算方法不一样
- 初始化:多尺度的 Harris corner detection( 改变清晰度后,单独找角点 )
只有在任何尺度上都是角点的点,才能被保留 - 基于拉普拉斯算子,进行尺度选择。对一个位置,哪一个尺度上拉普拉斯值最大,将这个位置和尺度作为角点
。 (唯一性,在这个尺度上是极大值,那么在另一个尺度上也是极大值,只是极大值的数值可能不同) ???
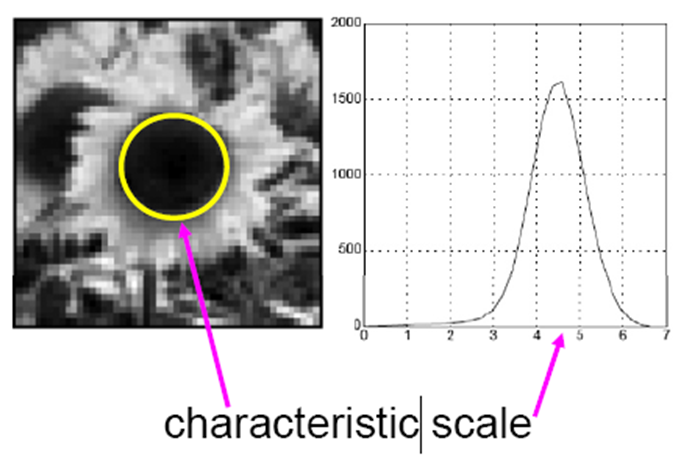
Laplacian-of-Gaussian = "blob" detector \(\nabla^2 g=\dfrac{\partial^2 g}{\partial x^2}+\dfrac{\partial^2 g}{\partial y^2}\)
在图像中给定的一个点,我们定义拉普拉斯响应值达到峰值的尺度为特征尺度 (characteristic scale)
SIFT¶
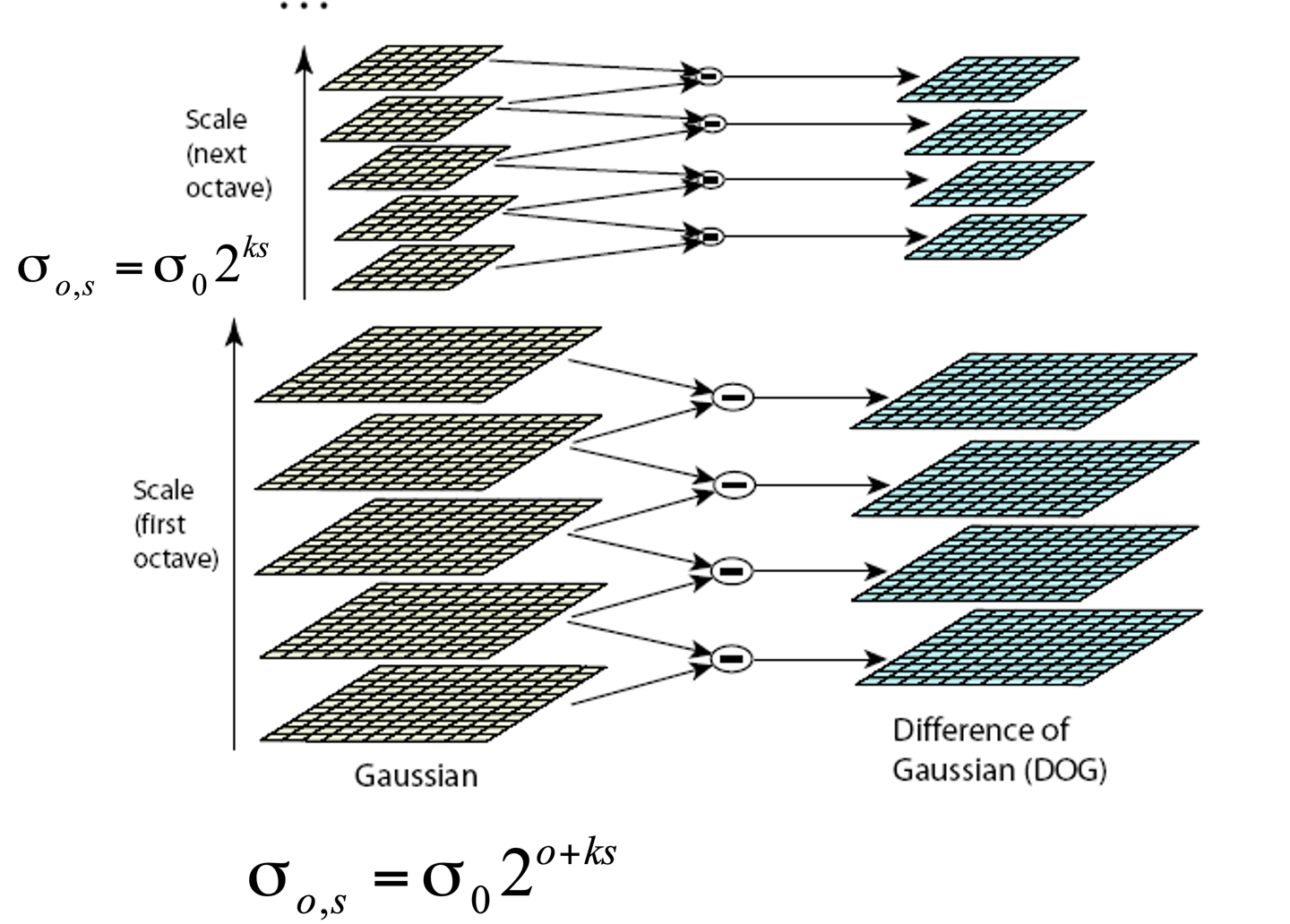
三个方向都是 DOG.
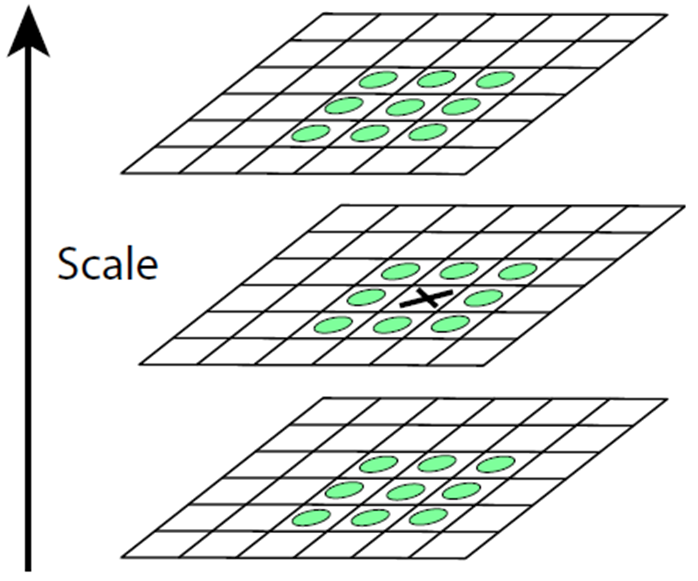
对于画 × 的需要比较 26 个邻居才能得出其是否是极值,计算速度相对较慢。
得到角点后,我们可以提取角点的特征,如方向性
-
梯度和角度
其中 \(m(x,y)\) 是点的幅值,即 x 方向的差分和 y 方向的差分的平方和
\(\theta(x,y)\) 是通过 y 方向的梯度和比上 x 方向的梯度的反正切计算

-
方向选择
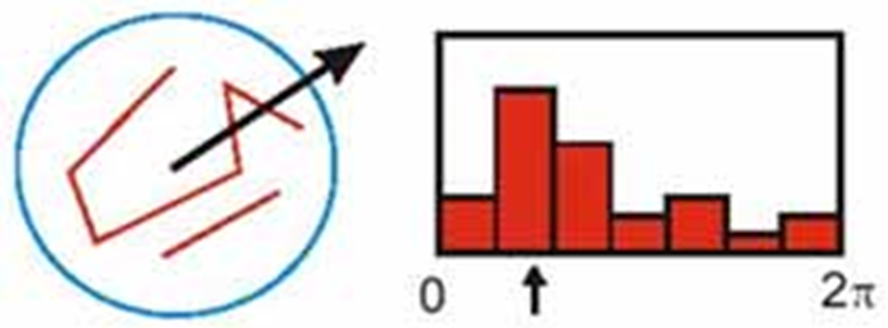
可以用投票的方式定义邻域的朝向
SIFT Descriptor¶
Invariance:
假设这里有两幅图像 \(I_1, I_2\), 其中 \(I_2\) 是 \(I_1\) 经过某种变换后的版本(仿射变换,亮度等)
在变换中不变的特征称为变换不变性
SIFT 特征:旋转不变性
根据其主要梯度方向(dominant gradient orientation)旋转 patch, 这样可以使他处于规范方向
Scale Invariant Feature Transform
基本思想
- 在检测到的特征角点周围选取 \(16\times16\) 的方形窗口
- 计算每个像素的边的朝向 ( 梯度的角度 - 90°)
- 剔除弱边缘 ( 小于阈值梯度幅度 )
- 创建剩下边的方向的直方图
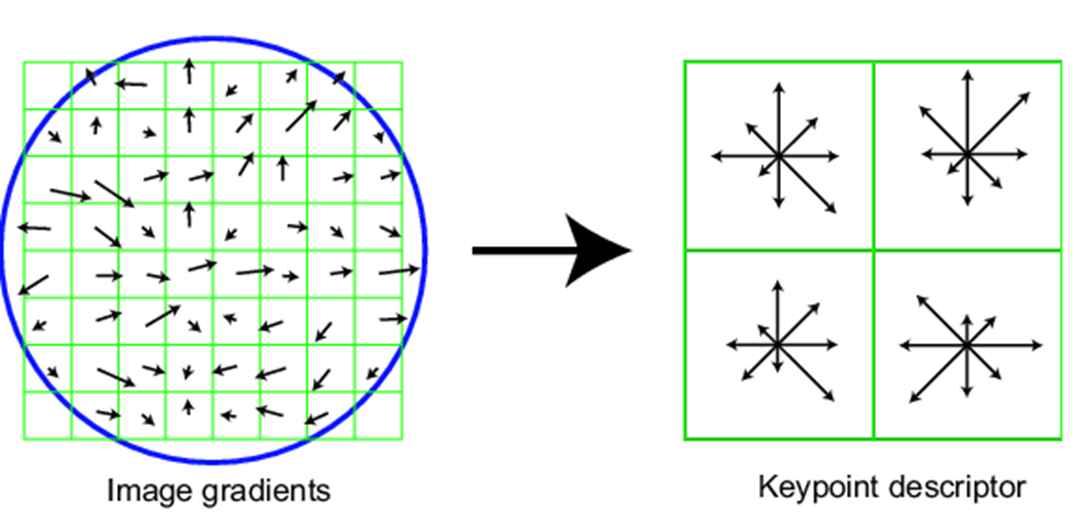

完整版:
- 将 \(16\times16\) 的窗口 划分为 \(4\times4\) 的网格
- 对每个网格计算其方向直方图
- 16 cells * 8 orientations = 128 dimensional descriptor(128 维向量 )
SIFT Feature
- Descriptor 128-D
- 可以通过去掉光照变化带来的影响
- 位置 \((x,y)\)
- 尺度,控制特征提取的覆盖范围
- 方向,实现旋转不变的 descriptor
SIFT 特征可以对图像进行分类
Bag of visual words
提取SIFT特征,将特征做一个聚类(kmeans),将每个聚类中心称为 visual word 视觉单词
Conclusion of SIFT
- 优点
- 期望在比例、旋转、光照等变化中的不变性。
- 局部 patch 具有很强的区分性和表征能力。
- 在刚性对象表示上非常有效。
- 缺点
- 提取耗时
对于大小为400 * 400的图像,平均需要1秒。 - 对非刚性物体性能较差。
如人脸、动物等。 - 在严重的仿射失真下可能无法工作。
局部补丁是一个圆,而不是一个椭圆调整到仿射失真。
- 提取耗时
SURF detectors and descriptors¶
- 角点检测 repeatable
- 特征提取:描述能力具有 dinstinctive robust
都需要 fast
SURF algorithm
-
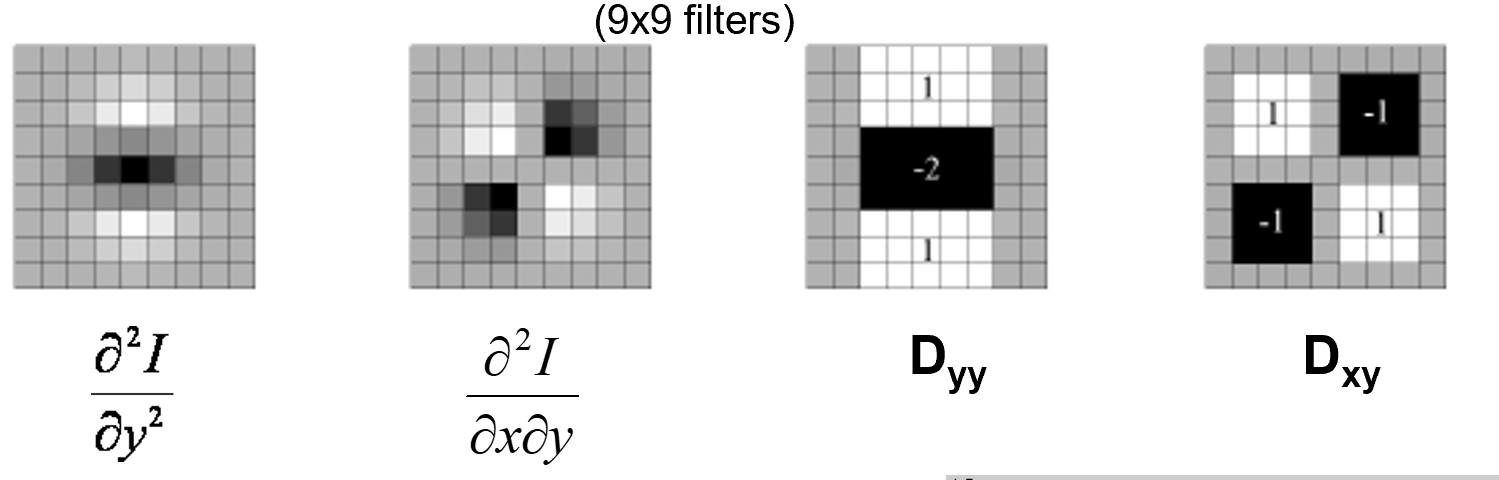
Interest point detector:
- 计算积分图像
坐标 \((x,y)\) 的像素值是 前缀和 \(s(x,y)\)(左上方长方形的像素值求和). - 应用二阶导数 ( 近似,求差分的差分,可以用积分图近似 ) 滤波器对图像滤波操作
- 非极大抑制 ( 在 \((x,y,\sigma)\) 空间中寻找局部极大值,其他的丢掉 )
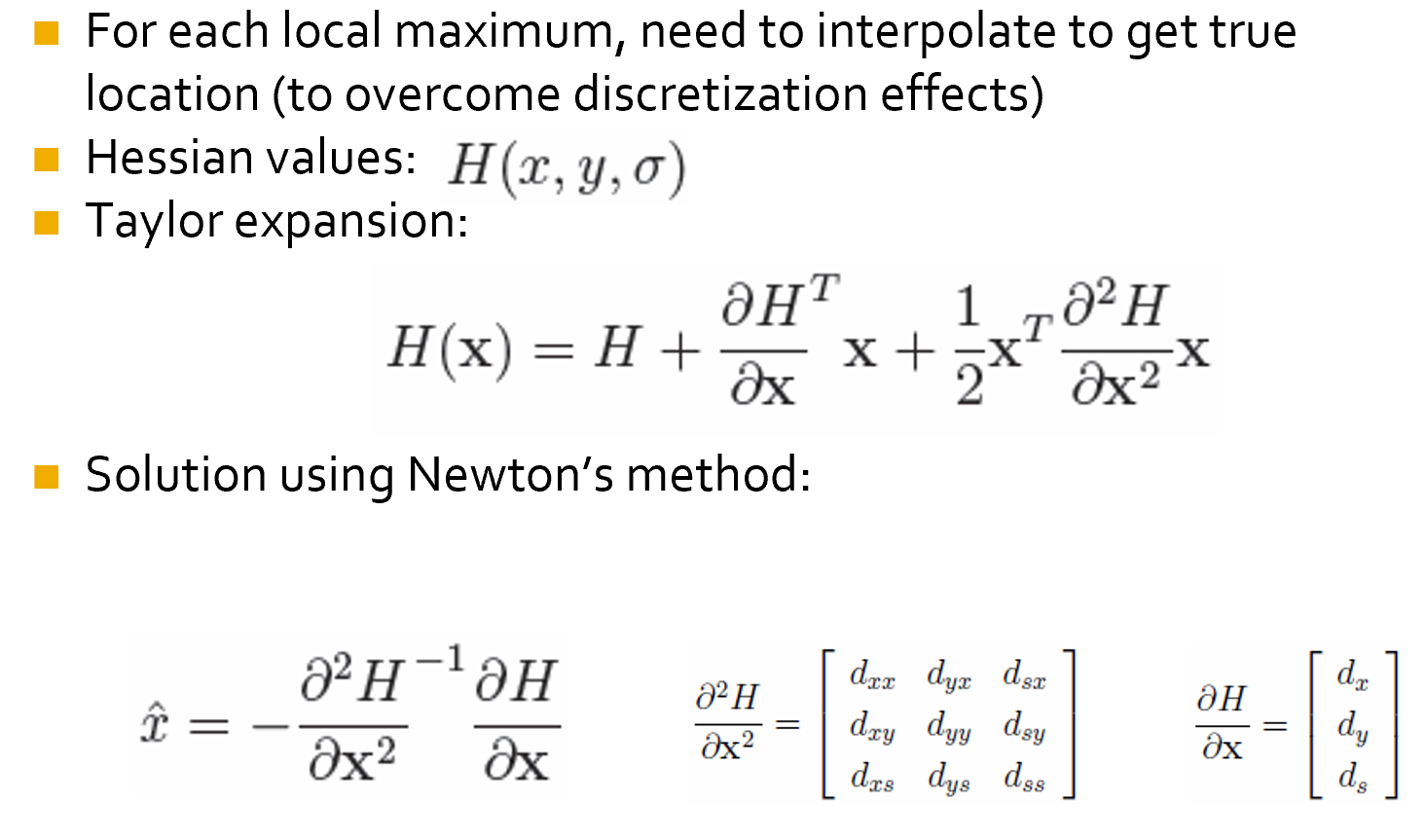
- 二次插值法
- 计算积分图像
-
Interest point descriptor:
- 把窗口分为 \(t\times 4\)(16 个子窗口 )
- 计算 Haar 小波特征(离散情况下的近似)
- 在每个子窗口内,计算 \(v_{subregion}=\left[\sum dx,\sum dy,\sum |dx|,\sum|dy|\right]\)
- 这得到 64 个特征
Integral Image¶
Integral Image(a.k.a. Summed area table) 是
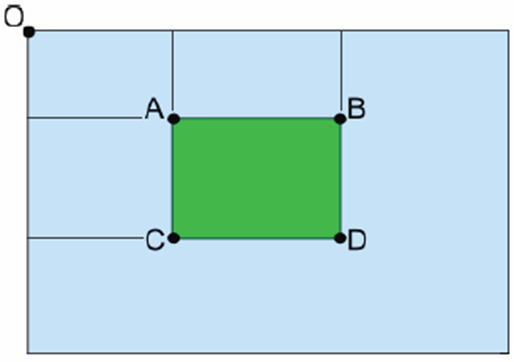
- \(S(x,y)=\sum\sum I(x,y)\)
- \(V(l,t,r,b)=S(l,t)+S(r,b)-S(l,b)-S(r,t)\) 得到矩形内的像素值的和
积分图让我们很方便的对尺度进行上采样
Interpolation¶
不同尺度之间可以用插值来计算中间的尺度。
Why SURF is better than SIFT
- 维度低 , 只用 64 维特征
- 在均匀、渐变、只有一条边的图像上 SIFT 无法分辨,但 SURF 可以
- 带噪声会使 SIFT 特征凌乱,对 SURF 几乎没有影响
RANSAC¶
RANSAC 解决图像拼接的离群点
RANSAC RANdom SAmple Consensus
排除离群点,只关注并使用 inliers.
思想:如果离群点被选中计算当前的匹配,那么回归出来的线肯定不足以支撑剩下点的匹配,和真正 inlier 得到的线有很大的差异。
RANSAC Loop
- 随机选择种子点作为转换估计的基础
- 计算种子点之间的变换
- 找到这次变换的 inliers
- 如果 inliners 的数目足够多,那么重新计算所有 inliners 上的最小二乘法估计
- 回归之后再计算 inliners 如此往复,继续调整。如果没有调整那我们可以停止循环。最终使得回归出的线达到最多的 inliners.
需要多少次取样?假设 \(w\) 是 inliners 的一部分 , \(n\) 个需要用来定义前提的点,进行了 \(k\) 次取样。
- \(n\) 个点都是正确的 \(w^n\)
- \(k\) 次采样都失败了 \((1-w^n)^k\)
- 选择 k 达到足够高使得失败的概率低于阈值
RANSAC 之后将数据划分为 outiler 和 inliner.
- 优点
- 对于模型拟合问题是一种通用的方法
- 容易实现,容易计算失败率
- 缺点
- 只能解决适度 outliers 时的情况,否则开销比较高
- 很多实际问题中的 outliers 的比率较高(但有时挑选策略可以有帮助,而非随机选取)
Image Blending - Pyramid Creation¶
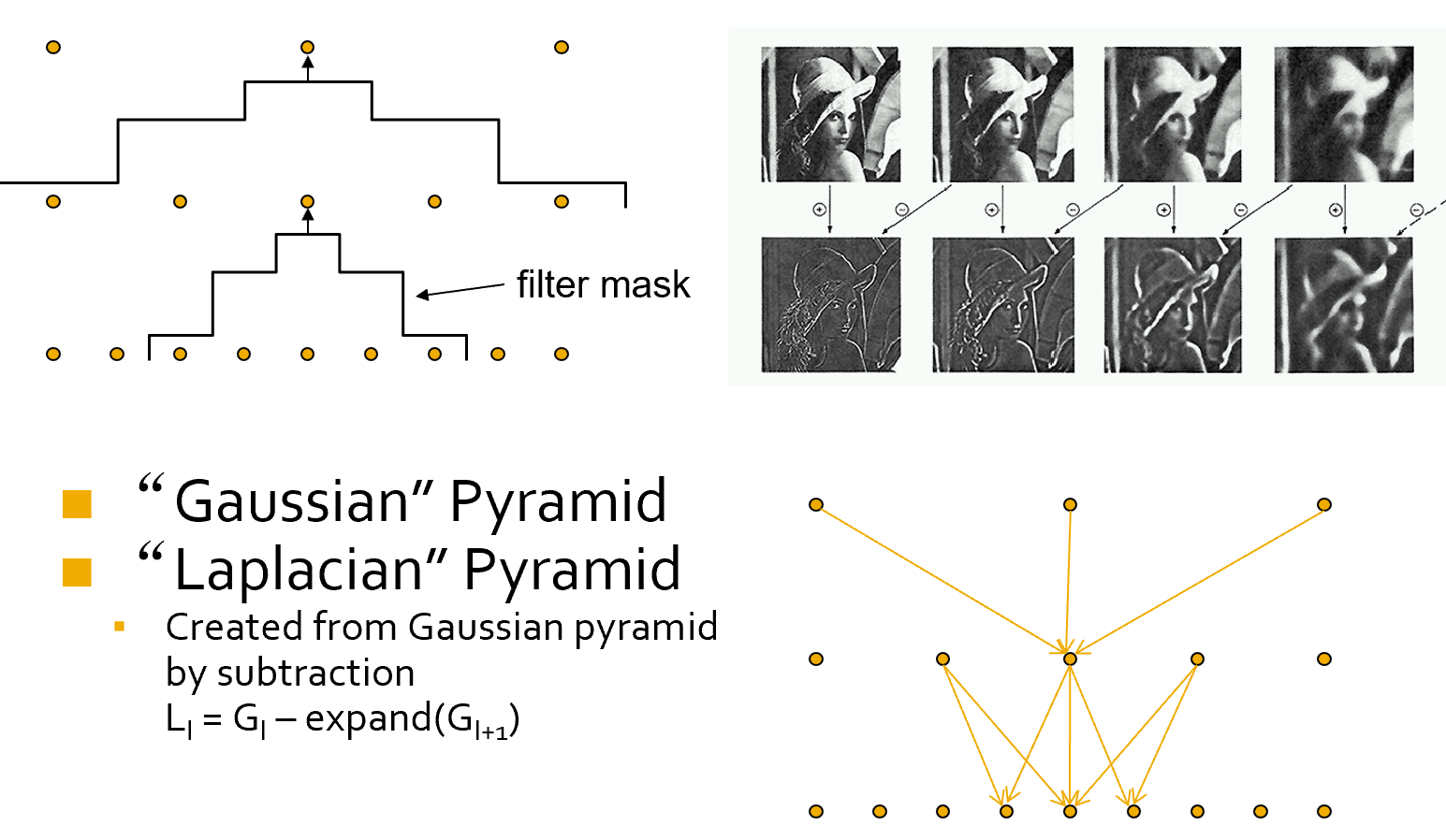
Image Stitching
- Detect key points 检测特征点
- Build the SIFT descriptors 提取 SIFT 特征
- Match SIFT descriptors SIFT 特征匹配(求欧氏距离)
- Fitting the transformation 计算变换
- RANSAC 筛除外点
- Image Blending 图像融合,解决跳变