GPipe: 利用微批处理流水线并行性轻松扩展 ¶
约 2390 个字 11 张图片 预计阅读时间 8 分钟
Abstract
- Paper: GPipe: Efficient Training of Giant Neural Networks using Pipeline Parallelism
- NeurIPS 2019: Neural Information Processing Systems 32
- 本文中的图片部分来自论文,部分来自知乎文章。
本文主要是流水线并行(Pipeline Parallelism
介绍 ¶
- 扩大深度神经网络容量有好处。
- 但受到加速器(Google 学者常用加速器这个说法,实际指 GPU、TPU 等设备)的内存、通信带宽的限制。
- 要把模型拓展到多个加速器上,需要特定的算法或者架构,这些解决方法一般是架构相关的,不能很好地拓展到其他任务。
- 为了实现高效、任务无关的模型并行,论文提出了 GPipe,其中使用了 batch-splitting、re-materialization 等技术。
- GPipe 可以实现近似线性的加速,在图像分类和语言模型任务上都有很好的效果。
算法 ¶
GPipe 在 Lingvo 框架上实现,可以搬到其他框架
Lingvo:可重复性。对于同样的代码,不同人跑可以得到相同的结果。把所有超参数、数据集都写在代码里。整个任务就是一个巨大的词典
Notation in this paper
假设深度神经网络表示为 \(L\) 层序列。给定分区数 \(K\),我们把网络切成 \(K\) 块(子序列、单元
假设从 \(i\) 层到第 \(j\) 层都放在第 \(k\) 个单元里,那么 \(p_k=w_i\cup w_{i+1}\cup \ldots\cup w_j\),\(F_k=f_j\circ\ldots \circ f_{i+1}\circ f_i\),\(C_k=\sum\limits_{l=i}^j c_l\),\(B_k\) 表示后向传播的函数,可以通过对 \(F_k\) 自动求导得到。
一个小批量(mini-batch)的大小为 \(N\),在 GPipe 算法里我们把一个小批量分为 \(M\) 个微批量(micro-batch
模型并行 ¶
朴素的模型并行性能不是很好,如下图:


存在下面的问题:
- GPU 利用度不够。因为 GPU 0 计算时,GPU 1 2 3 都在等待。这也导致模型并行的计算时间和在单 GPU 上计算的时间是一样的。
- 中间结果占据大量内存。
流水线并行 - batch-splitting ¶
思路:将每个原始 batch(论文中称为 mini-batch)切分为多个 micro-batch,然后依次送进 GPU 中进行流水线执行。
图例如下:
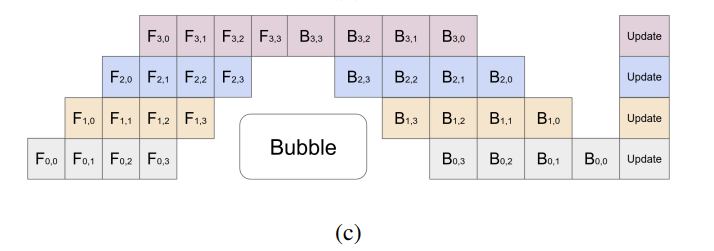
这样在 GPU0 的第 0 个 micro-batch 执行完时,GPU1 就可以根据 GPU0 的输出开始执行第 0 个 micro-batch。这样同时可以有多个 GPU 在执行不同的 micro-batch,从而提高了并行度
这里存在空闲的时间,即有 GPU 没有投入运算的时间,称为 bubble。然而只要切块足够多 bubble 的影响就可以降到足够低。论文提到 bubble 时间为 \(O(\dfrac{K-1}{M+K-1})\),单位是单个 micro-batch 的执行时间。当 \(M\geq 4\times K\) 时气泡的时间可以忽略不计。
在 micro-batch 的划分下,我们在计算 Batch Normalization 时会有影响。GPipe 的方法是,在训练时计算和运用的是 micro-batch 里的均值和方差,但同时持续追踪全部 mini-batch 的移动均值和方差,以便在测试阶段进行使用。Layer Normalization 则不受影响。
流水线并行 - re-materialization(active checkpoint) ¶
激活内存 activation 消耗了很多显存,因此论文采取了用计算换取空间的做法,提出了 re-materialization(也被称为 active checkpoint
activation

可以看到,\(z\) 是前向计算的中间结果,但是在反向计算梯度时,我们要计算 \(\dfrac{\partial \sigma(z)}{\partial z}\),这里可能需要 \(z\) 的值。因此朴素的做法是存储所有中间结果,以便反向计算时用到。
然而存储激活值是非常消耗显存的,这里的 \(z\) 是 \(n\times d\) 大小的,其中 \(n\) 是批量大小,\(d\) 是隐藏层大小。假设有 \(l\) 层,那么激活内存的空间复杂度为 \(O(ndl)\),可能会很大。
因此在 GPipe 中,我们只存每一个 micro-batch 的输入。每个 GPU 内的数据流如下:

分析 ¶
这里我们讨论单个 GPU 的空间复杂度。每块 GPU 峰值时刻存储大小 = 每块 GPU 上的输入数据大小 + 每块 GPU 在 backward 过程中的中间结果大小。
-
如果不使用 batch-splitting 和 re-materialization,空间复杂度为 \(O(N\times \dfrac{L}{K} \times d)\)。
-
GPipe 的空间复杂度:
- 对于每个 micro-batch 的数据流,要保存其输入。一块 GPU 总共要保存的输入就是一个 mini-batch,大小为 \(N\)。
- 每个 micro-batch 是流水线形式进来的,算完一个 micro-batch 才算下一个。在计算一个 micro-batch 梯度的过程中,我们会产生中间变量(重算导致的
) ,大小为 \(\dfrac{N}{M}\times \dfrac{L}{K} \times d\)。 - 因此每块 GPU 的空间复杂度为 \(O(N+\dfrac{N}{M}\times \dfrac{L}{K} \times d)\)。
除此之外,切分模型时要考虑到负载均衡,某个 GPU 上的计算如果很难,可能会拖慢整个流水线。
实验 ¶
论文中介绍了 GPipe 跑 AmoebaNet 变形虫、Transformer 模型的实验。
-
模型参数
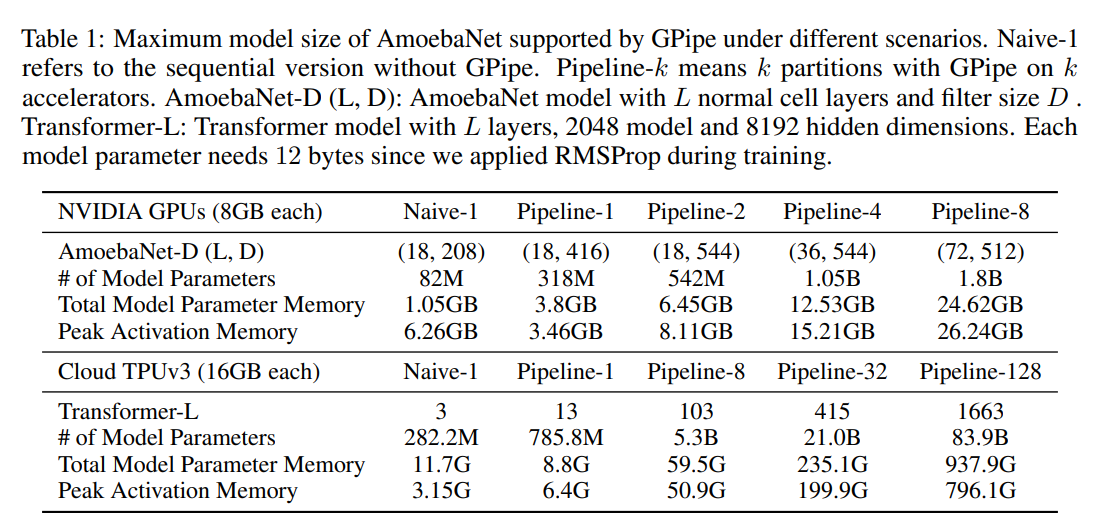
可以看到使用流水线并行后,能够放下的模型参数变大了。但是因为变形虫模型我们无法均匀切割,因此会有负载均衡的问题,可以看到加速效果达不到线性;transformer 的模型较为均匀,因此能够支持的参数比例和使用的 GPU 数是一个近似线性的增长。。
-
训练速度
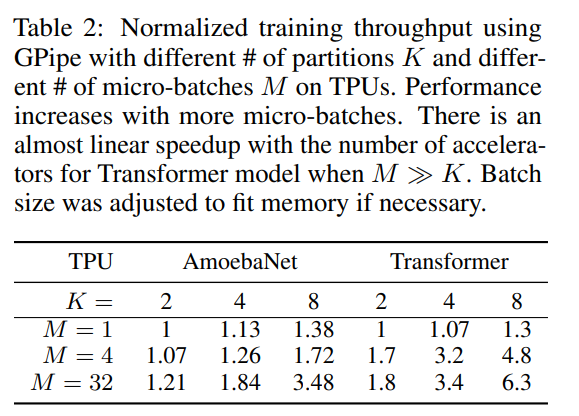
使用不同数量的 GPU(K)和不同的 micro-batch 数量(M)进行训练,可以看到 GPipe 的训练速度是近似线性的。可以看到 M=32 时训练速度显著提高,也是近似线性的加速。
-
GPipe 的时间消耗占比
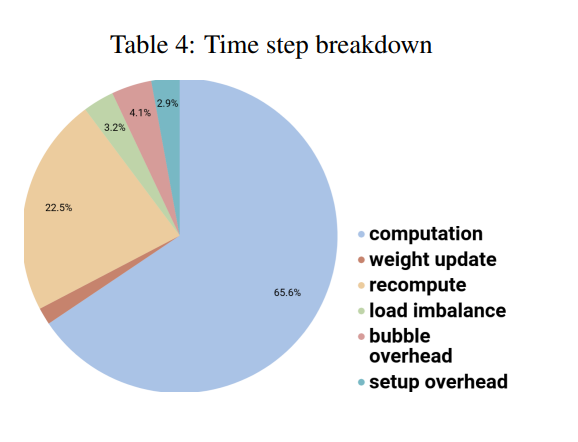
每块 GPU 大约 ⅔ 的时间是在做真正有效的计算,其余 ⅓ 里的大部分时间是在重算(re-materialization
) 。bubble 相比之下是很小的。 -
此外论文还贴出了在没有高速互连的 GPU 上使用 GPipe 的归一化训练吞吐量,以此来说明:用慢的通信,也可以达到很好的增速,进而证明 GPipe 的算法的通讯量并不大。
结论和讨论 ¶
论文第六部分讨论了不同的切法,适合不同的模型、系统。并在结论部分提出了论文的贡献:
- 性能 efficiency:近似线性提速。
- flexibility 灵活性:不依赖于某个特定的架构。
- reliability 可靠性:同步更新,相比之下 PipeDram 是异步。
个人的评论如下
- 本文投在 2019 NeurIPS 上,偏算法,近年也有系统。单栏且最多 8 页。因此 NeurIPS 上系统的文章相对比较简单,写的系统味不能很足(reviewer 不一定有足够的相关背景
) 。相比之下同年 SOSP 的 PipeDram 的思路和 GPipe 类似,但是做了一个更大的系统,涉及到的部分更多。有趣的是最后 GPipe 的引用数更多,一定程度上说明大家更偏好这样简单、直接的算法文章。 - 机器学习系统的文章,自己提出一个更大的任务,同时要说明这个任务是有意义的(更大的模型效果更好
) ,而不是简单的放大任务。 - 论文里说之前工作提出的方法,大多基于特定架构。但实际上本文也是基于 Lingvo 框架的,只是说可以把算法思路拓展到其他模型上。但是像 DP、MP 就是一个算法,理论上对于任何神经网络都可以用,只是需要换一下具体实现。这些工作其实本质和本论文的 GPipe 是一致的。就此说别人的方法是基于特定架构,略有偏颇。
- 局限性的地方也可以是特性。可以看到在最后贡献这里论文提到了同步更新,这样其实会带来效率较低的问题。但同时同步更新可以让通信量减少,因此这个点即是局限性也是特性。Every coin has two sides.
- 虽然论文说 GPipe 的性能很好,但实际上这些加速比都是和自己模型相比的,并没有在相同问题上和现在 SOTA 算法比性能。这是因为 GPipe 本身用更多的计算量换取了更多的空间,这也导致很难和其他算法比较。为此论文取巧的地方分析了训练时间的比例,让实验部分更加完整。
参考资料 ¶
- Mu Li 的 b 站视频“GPipe 论文精读”
- 知乎文章“[ LLM 分布式训练系列 02 ] 流水线并行(Pipeline Parallelism)- GPipe”
- 知乎文章“流水线并行(Pipeline Parallelism
) ,以 Gpipe 为例”